4.1.4 Intpo
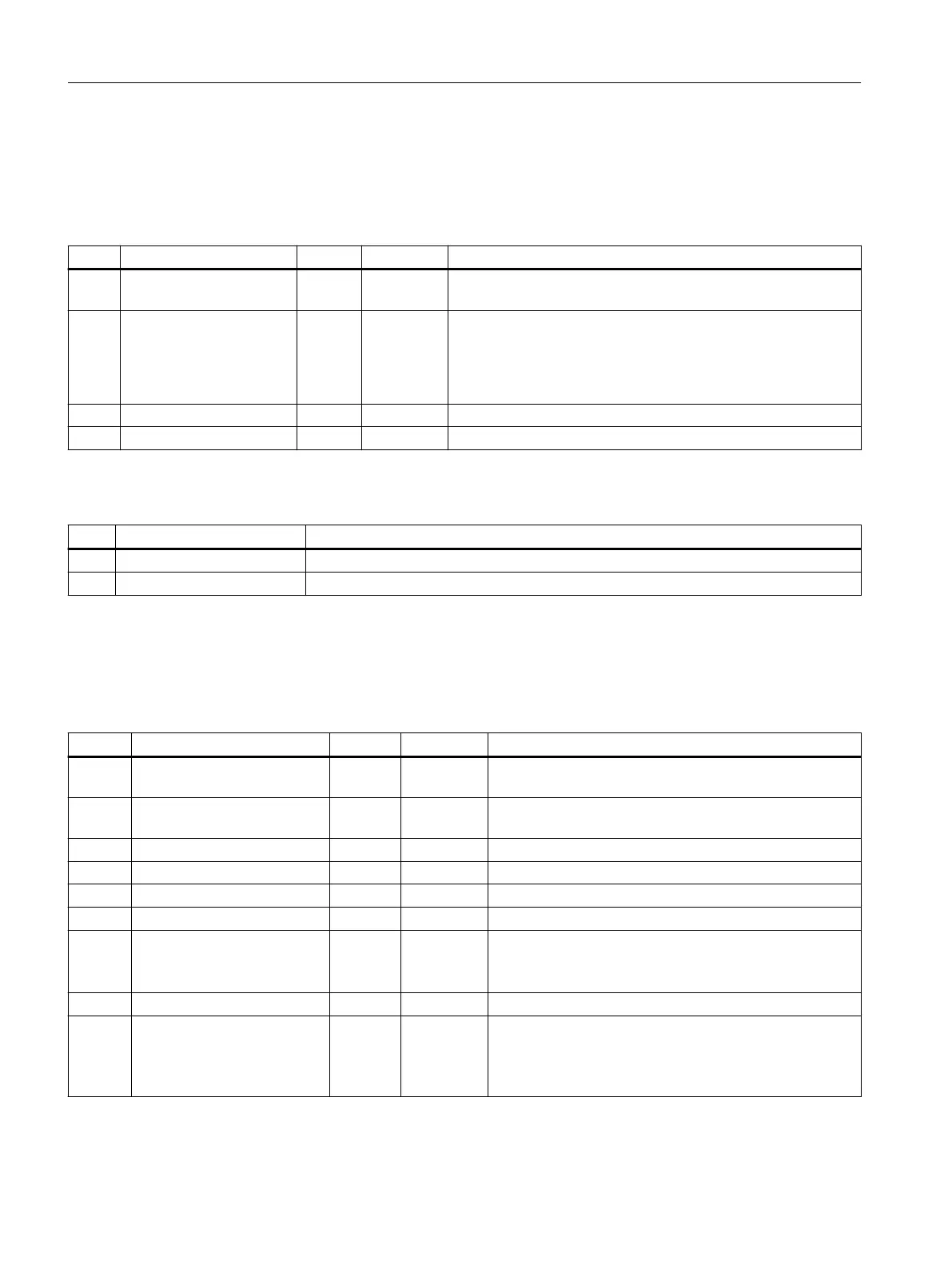
Table 4-7 SIMATIC S7 → SIMOTION, Trolley
PZD Signal name Unit Format Remark
1 STW1_PLC_Intpo - WORD Control word
See table below
2 LIST_IDX - Byte 1 Received interpolation point number
The interpolation point number selects a particular interpolation
point and returns its hoist and trolley positions. The interpolation
point number must not be greater than the number of existing
interpolation points. Otherwise an error is returned.
2 - - Byte 2 Reserved
3-5 - Reserved
Table 4-8 STW1_PLC_Intpo
Bit Signal name Remark
0 ENABLE Activate transfer of obstacles.
1-15 - Reserved
4.1.5 TLS
Table 4-9 SIMATIC S7 → SIMOTION, TLS
PZD Signal name Unit Format Remark
1 STW1_PLC_TLS - WORD Control word 1
See table below
2 STW2_PLC_TLS - WORD Control word 2
See table below
3-4 ActPos_cylinder_A 1 DINT Cylinder A position
5-6 ActPos_cylinder_B 1 DINT Cylinder B position
7-8 ActPos_cylinder_C 1 DINT Cylinder C position
9-10 ActPos_cylinder_D 1 DINT Cylinder D position
11-12 SkewAngle_ext_for_TLS cgr DINT External skew angle for TLS positioning
(see Chapter Control of the modes and the skew damping
for the hydraulic system (Page 260)
13-14 - Reserved
15-16 SkewPos_ext_for_Eaxis mm DINT External skew position for electric drive
(see Chapters Controlling movement of the electric drive
(Page 259) and Controlling travel and skew damping with
electric drive (Page 261))
Communication interface to SIMATIC S7
4.1 SIMATIC S7 → SIMOTION D for AddOn
SC integrated STS, GSU
90 Operating Instructions, 07/2019, A5E48271265B AA
 Loading...
Loading...