Communication interface to SIMATIC S7
4
The entire Sway Control interface between SIMATIC S7 and SIMOTION D is illustrated in this
chapter. A bitwise representation is given for the control and status words and all signals are
described with details of the associated format and relevant unit.
4.1 SIMATIC S7 → SIMOTION D for AddOn
4.1.1 Common
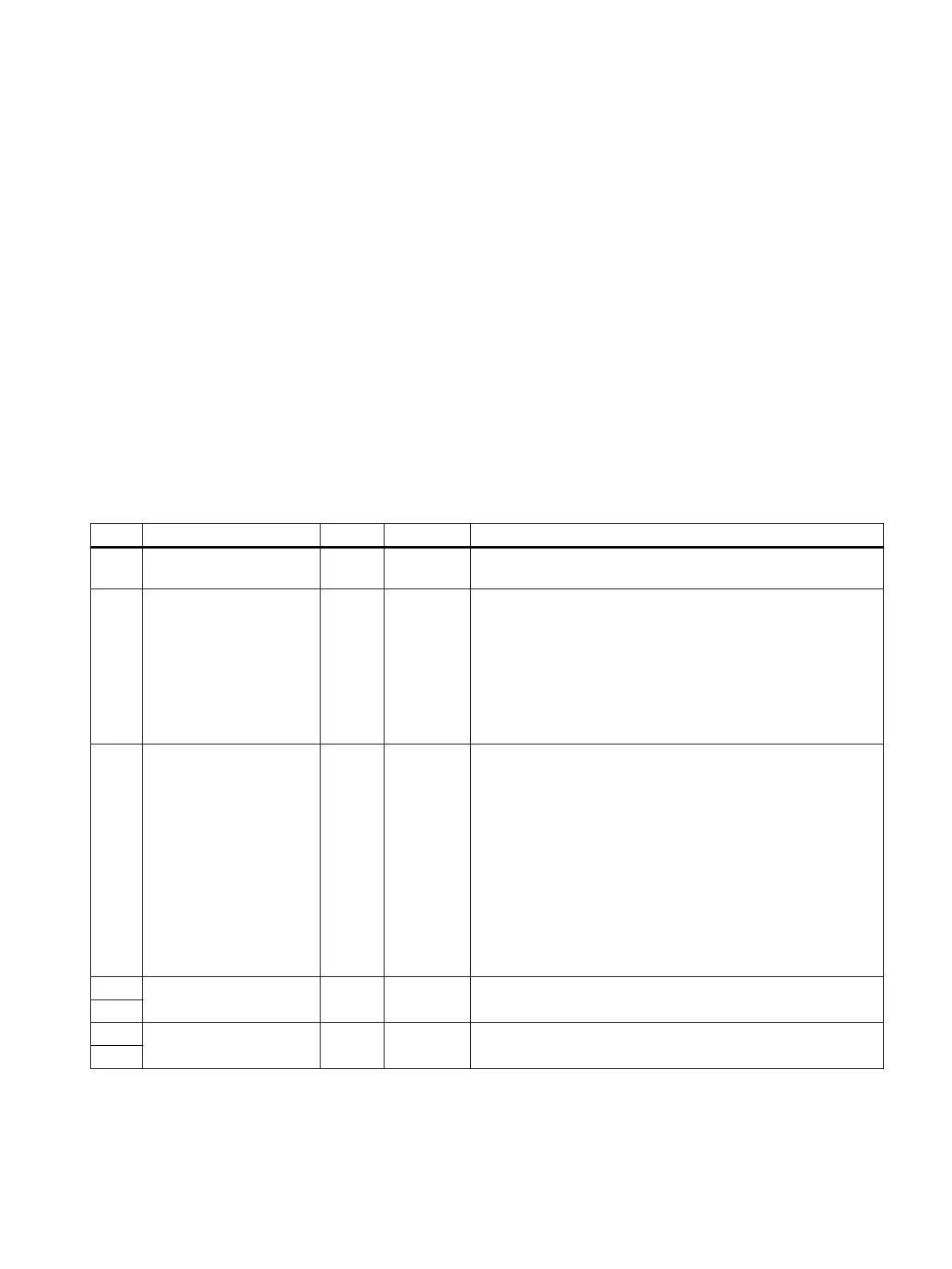
Table 4-1 SIMATIC S7 → SIMOTION, Common
PZD Signal name Unit Format Remark
1 STW1_PLC_Common - WORD Control word
See table below
2 LOAD 10 kg INT Load
The current total load (weight of the payload including weight of
the load suspension device) is determined by the load meas‐
urement system and transferred to the sway control system via
the PLC. This value is used for analog correction of the effective
pendulum length.
1 increment for each 10 kg
Load is limited to values between 0 and 32767
3 PARSET - SINT Parameter set
Number for selecting the four different parameter sets. Various
velocities or accelerations can be set in the different sets, for
example.
1: Parameter set 1
2: Parameter set 2
3: Parameter set 3
4: Parameter set 4
Note:
If the upper or lower limit is violated, the value is limited to the
upper or lower limit.
4 VALUE_BAYSCANNER mm DINT Bay scanner value
see Chapter Using a bay scanner (Page 204)
5
6 COUNT_BAYSCANNER - DINT Bay scanner counter
see Chapter Using a bay scanner (Page 204)
7
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 83
 Loading...
Loading...