Formation of obstacles
The table below illustrates the formation of obstacles (H_NEU) depending on the relevant
values.
The relevant values are:
● BAYSCANNER_VALID
● COUNT_BAYSCANNER
● VALUE_BAYSCANNER (L_ACT) (current bay scanner value)
● S_ACT (current hoist position)
● H_ALT (obstacle before moving on the waterside again)
H_NEU represents obstacles after moving on the waterside again.
Requirements before obstacles can be formed:
● Control bit LEARN_PROFILE_ON = 1
● Control bit LEARN_PROFILE_RESET = 0
Note
For each further movement over the waterside, in the table below "H_NEU" must be replaced
with "H_ALT."
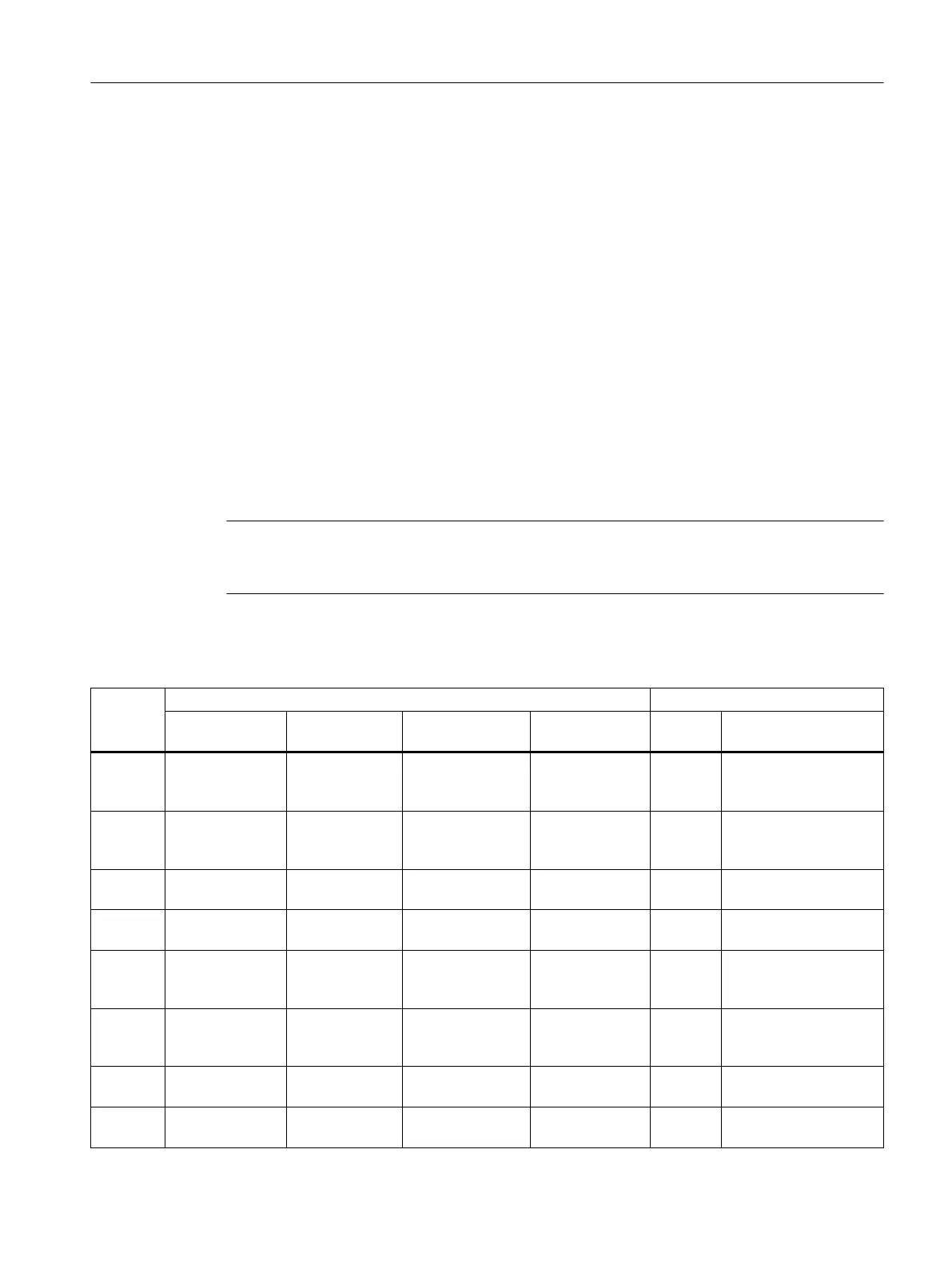
Table 6-7 Formation of obstacles
Situation Input variables Result
BAYSCANNER_
VALID
COUNT_
BAYSCANNER
Dependency
S_ACT / H_ALT
Dependency
S_ACT / L_ACT
H_NEU Remark
a 0 < 2 Hz S_ACT > H_ALT H_ALT Bay scanner deselec‐
ted,
Regular operation
b 0 < 2 Hz S_ ACT < H_ALT S_ACT Bay scanner deselec‐
ted,
Regular operation
c 1 < 2 Hz S_ ACT > H_ALT H_ALT Bay scanner selected,
Error E59
d 1 < 2 Hz S_ ACT < H_ALT S_ACT Bay scanner selected,
Error E59
e 0 > 2 Hz S_ACT > H_ALT H_ALT Should not occur in
practice in the error-
free condition.
f 0 > 2 Hz S_ACT < H_ALT S_ACT Should not occur in
practice in the error-
free condition.
g 1 > 2 Hz S_ACT > H_ALT S_ACT > L_ACT L_ACT Bay scanner selected,
Regular operation
h 1 > 2 Hz S_ACT < H_ALT S_ACT > L_ACT L_ACT Bay scanner selected,
Regular operation
Sway Control function description
6.14 Bay scanner
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 207
 Loading...
Loading...