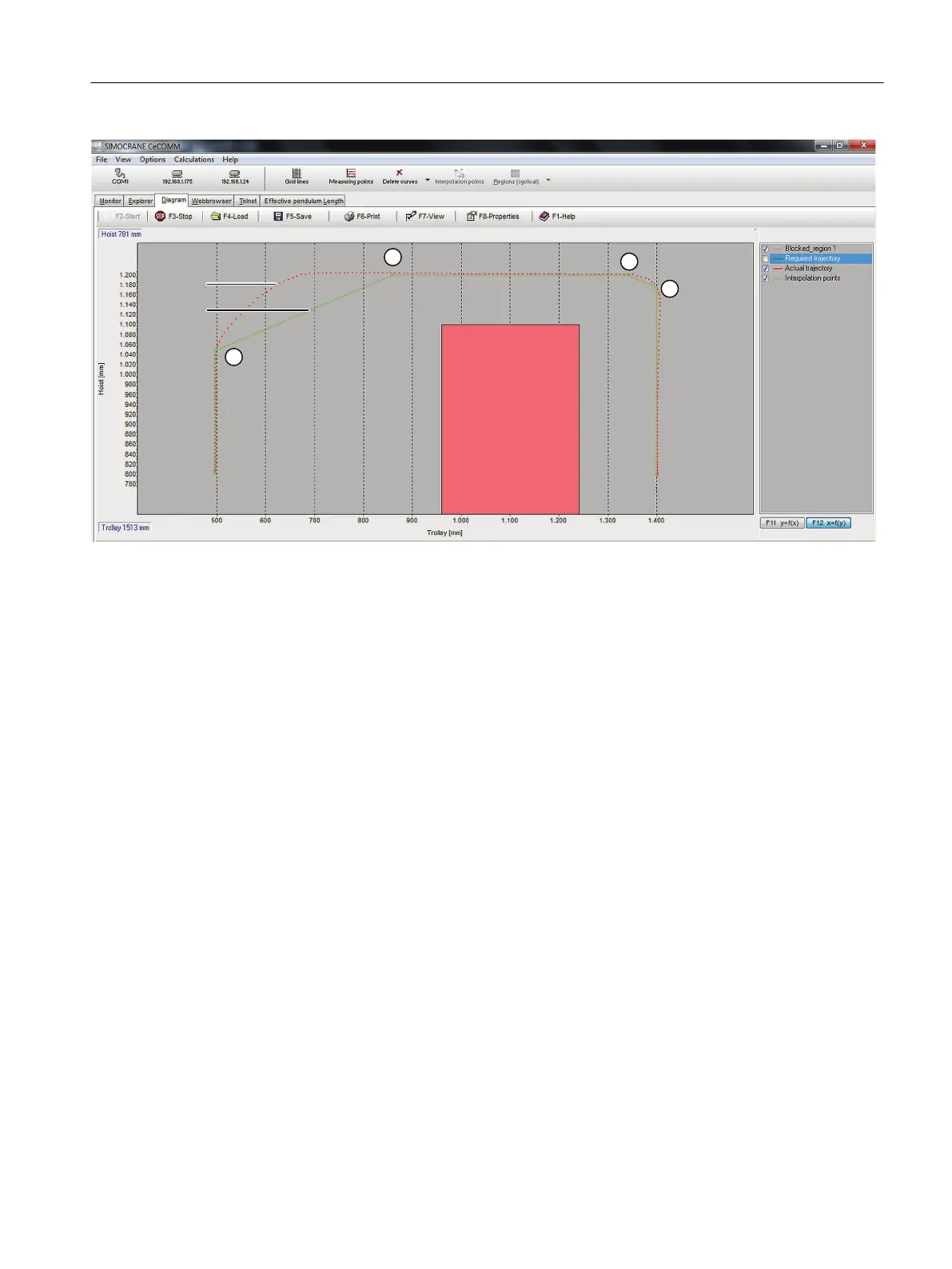
A Starting position
B Blocked regions
C Target position
D Trajectory actually travelled
E Connecting line between starting position - interpolation points - target position
①②③④ Interpolation points
Figure 6-36 A trajectory and interpolation points as represented by SIMOCRANE CeCOMM
The following data must be known before travel in SAM mode can commence:
● Blocked regions
● Starting position
● Target position
● Immersion point
The interpolation points are calculated on the basis of this data.
The interpolation point calculations provide the basis for the trajectory.
Sway Control function description
6.15 Calculation of 2D trajectory in semi-automatic mode (SAM)
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 215
 Loading...
Loading...