Section 3:
● Depending on the control selected in STW1_PLC_TLS, control bits 8 ... 13, the status bits
8 ... 15 change to "true".
In this example:
– "c_in" (ZSW1_PLC_TLS, bit 14)
– "d_in" (ZSW1_PLC_TLS, bit 15)
– "a_out" (ZSW1_PLC_TLS, bit 8)
– "b_out" (ZSW1_PLC_TLS, bit 9)
● The "motion_terminated" status bit (ZSW1_TLS_PLC, bit 3) changes to "false" when the
movement starts.
● The output velocities of cylinders A, B, C and D are specified by "BSPEED_A_NORM",
"BSPEED_B_NORM", "BSPEED_C_NORM" and "BSPEED_D_NORM".
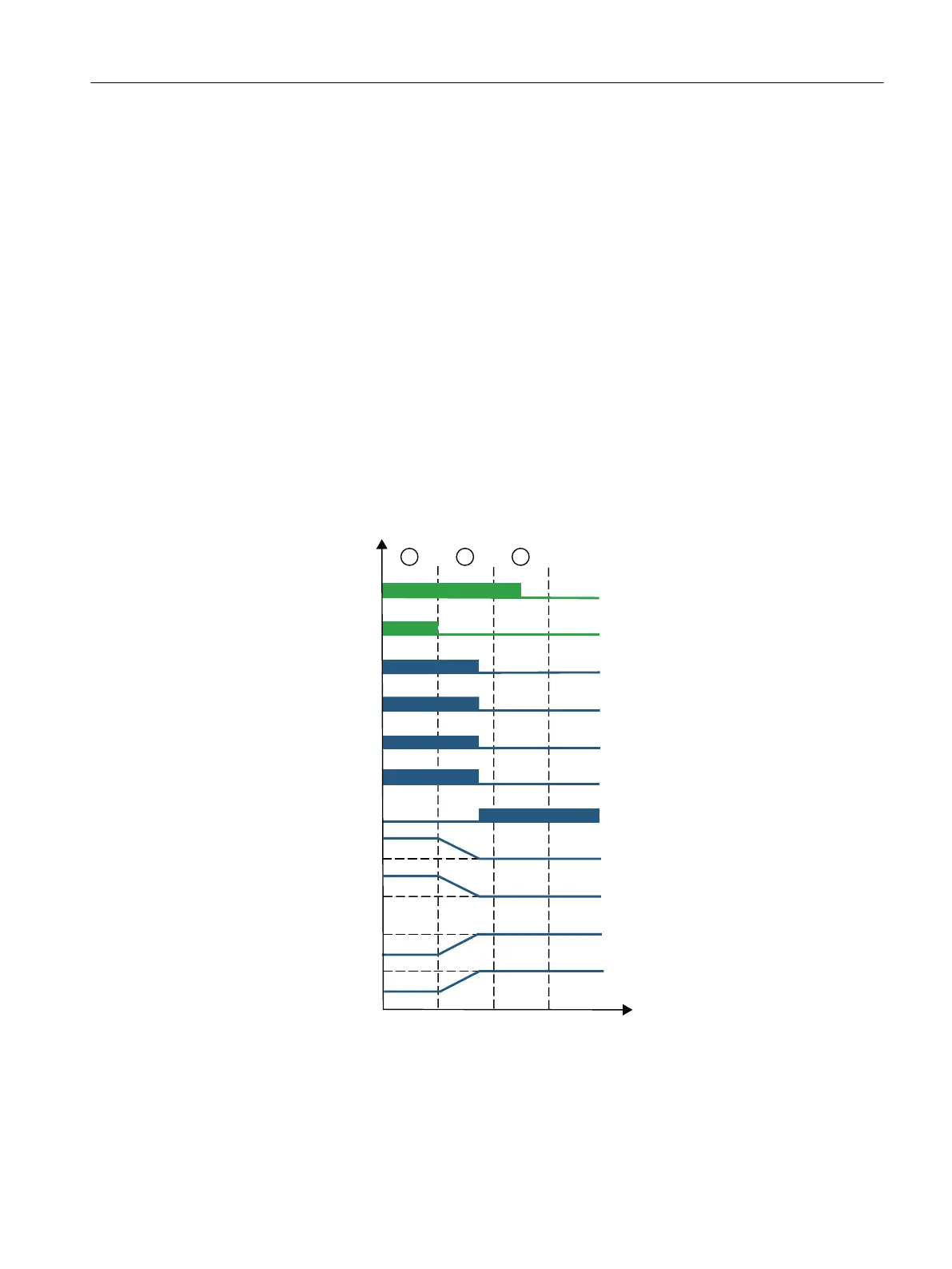
End "TLS jogging" mode
In this example, "trim_right" is deselected as one of the options for "TLS jogging" mode.
PRYH
WULPBULJKW
FBLQ
GBLQ
,1
DBRXW
EBRXW
,1
287
287
287
287
PRWLRQBWHUPLQDWHG
%63(('B$B1250
%63(('B%B1250
%63(('B&B1250
%63(('B'B1250
287
287
287
287
287
Figure 7-10 Signal sequence for ending travel in "TLS jogging" mode
Section 1:
Cylinders A ... D move according to the control command "trim_right" at the relevant output
velocity.
TLS control function description
7.2 TLS modes and TLS functions
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 249
 Loading...
Loading...