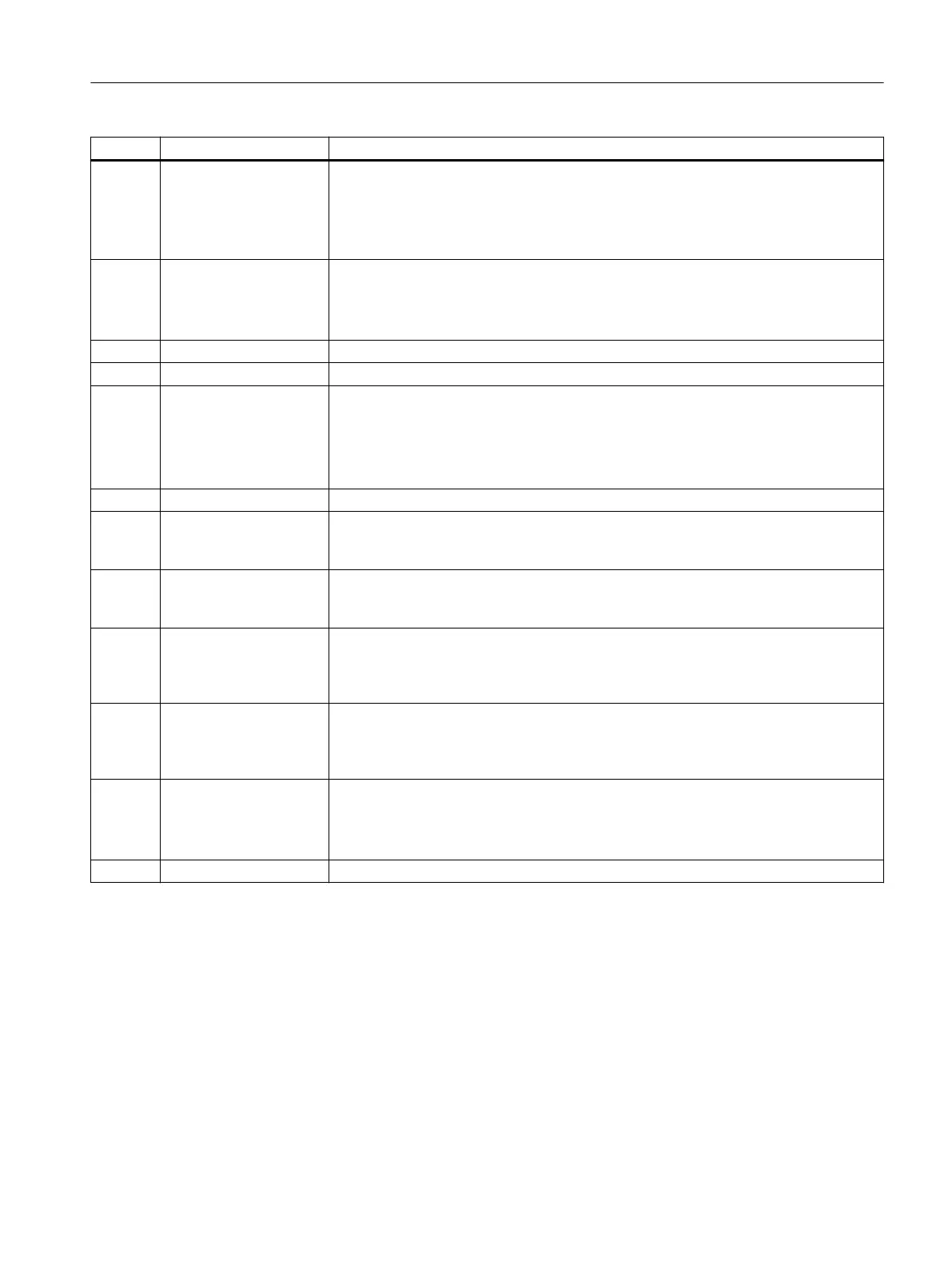
Bit Signal name Remark
2 POS Positioning mode (POS)
A set position is specified by the higher-level control system or the target generator. In
this mode, the hoist travels to this position.
0: Not active
1: Active
3 MAN Manual mode (MAN)
The higher-level control system specifies a set velocity.
0: Not active
1: Active
4 - Reserved
5 - Reserved
6 SAM Semi-automatic mode (SAM)
If the trolley and the hoist are in this operating mode and target positions are specified
for both drives, a calculated trajectory will be traveled.
0: Not active
1: Active
7 - Reserved
8 LS_UP Limit switch up
0: Operated
1: Not operated
9 LS_DN Limit switch down
0: Operated
1: Not operated
10 PRELS_UP Prelimit switch up
This bit is active only when P115 = 0. Otherwise the dynamic prelimit switch will be used.
0: Operated
1: Not operated
11 PRELS_DN Prelimit switch down
This bit is active only when P115 = 0. Otherwise the dynamic prelimit switch will be used.
0: Operated
1: Not operated
12 BRAKE_CLOSED Output value enable
0: Output value and direction signals are set.
1: Output value is not enabled (braking with maximum deceleration); direction signals
are set.
13-15 - Reserved
Communication interface to SIMATIC S7
4.1 SIMATIC S7 → SIMOTION D for AddOn
SC integrated STS, GSU
Operating Instructions, 07/2019, A5E48271265B AA 87
 Loading...
Loading...