10.03
4.4 Closed-loop force control
4-115
Siemens AG, 2003. All rights reserved
SINUMERIK 840D/SIMODRIVE 611 digital, HLA Module (FBHLA) - 10.03 Edition
4.4 Closed-loop force control
S Pressure sensors must be installed
S Force limitation and/or static friction injection activated
(MD 5241: FORCECTRL_CONFIG)
S Piston position must have been calibrated (see Subsection 3.9.4)
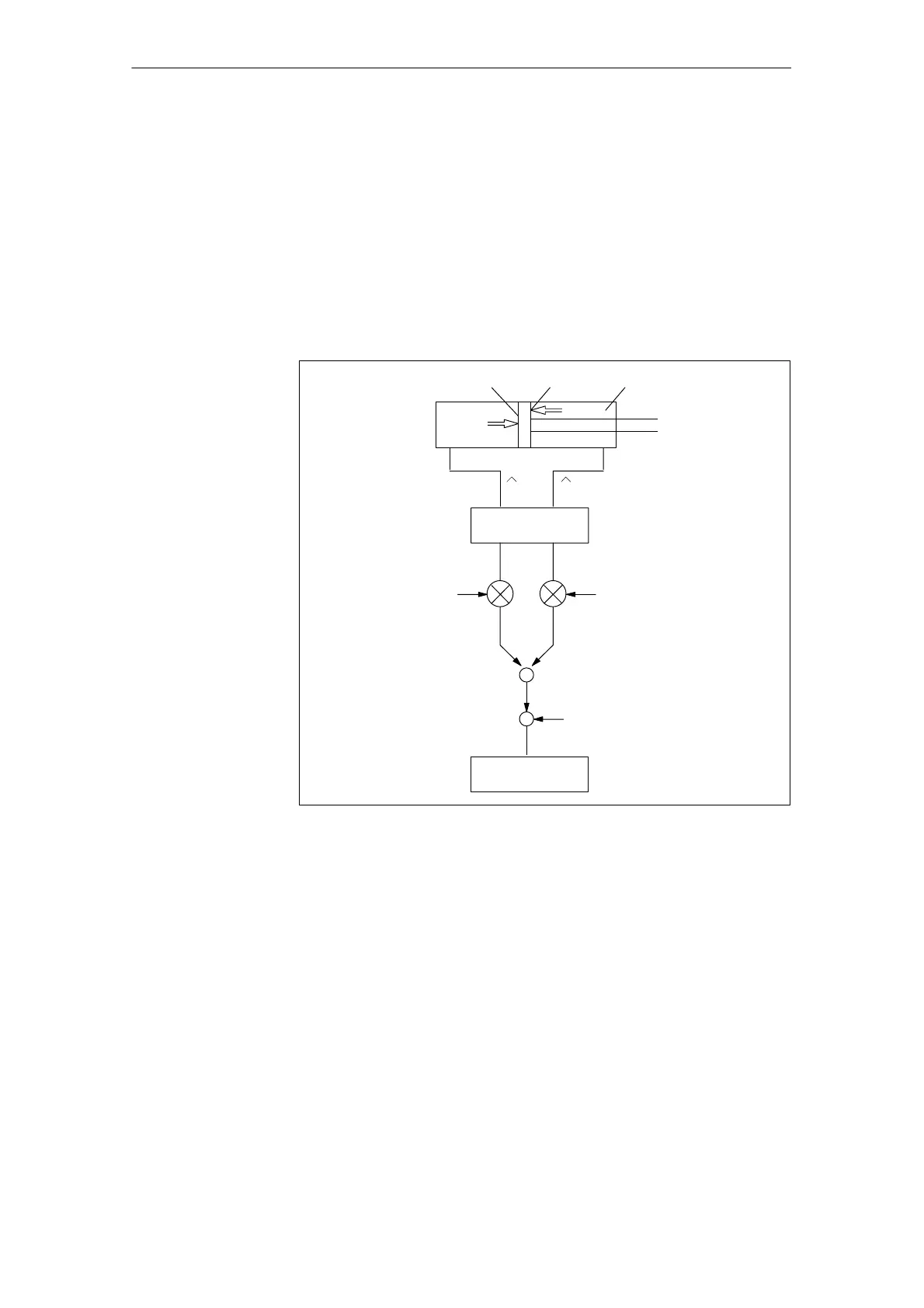
P
A
F
B
∆F=F
piston
=F
act
F
A
A
B
A
A
Measured value
recording
OB
P
B
A
B
A
A
Force controller
F
A
F
B
MD 5131
MD 5132
MD 5131
MD 5133
F
set
-
-
Where:
A: Area
P: Pressure
F: Force
Cylinder
Fig. 4-12 Actual force measurement sensing
To start up the force controller, the measuring functions and function generator
can be redirected from the velocity controller to the force controller by setting bit
8 in MD 5650. In this setting, velocity setpoints are interpreted as force setpoints
in units of kN. This mode is deactivated by clearing MD 5650, bit 8
(mm/min → kN).
Force limitation is required
S in certain machining processes for which the “Travel to fixed stop” function
must be implemented or
S to work material in the machining of force profiles.
This compensation function is needed to compensate the effects of static fric-
tion occurring when the traversing direction changes (reduction of contour er-
rors, see e.g. circularity test).
Requirements
Starting up the
force controller
Force limitation
Static friction
compensation
4 Firmware Drive Functions
04.00

 Loading...
Loading...




