10.03
4.5 Manipulated voltage output
4-124
Siemens AG, 2003. All rights reserved
SINUMERIK 840D/SIMODRIVE 611 digital, HLA Module (FBHLA) - 10.03 Edition
4.5 Manipulated voltage output
4.5.1 Characteristic compensation
Various non-linear effects of valve or drive can be compensated by means of
characteristics. The characteristics are cascaded so that they can be set sepa-
rately.
5462
AREA_FACTOR_POS_OUTPUT [n] 0...7 index of the parameter set
Cross reference: -
Piston surface adaptation factor, positive Related to:
HLA
Protection level:
3/3
Unit:
%
Default:
100.0
Minimum:
50.0
Maximum:
200.0
Data type:
FLOAT
Active:
Immediately
5463
AREA_FACTOR_NEG_OUTPUT [n] 0...7 index of the parameter set
Cross reference: -
Piston surface adaptation factor, negative Related to:
HLA
Protection level:
3/3
Unit:
%
Default:
100.0
Minimum:
50.0
Maximum:
200.0
Data type:
FLOAT
Active:
Immediately
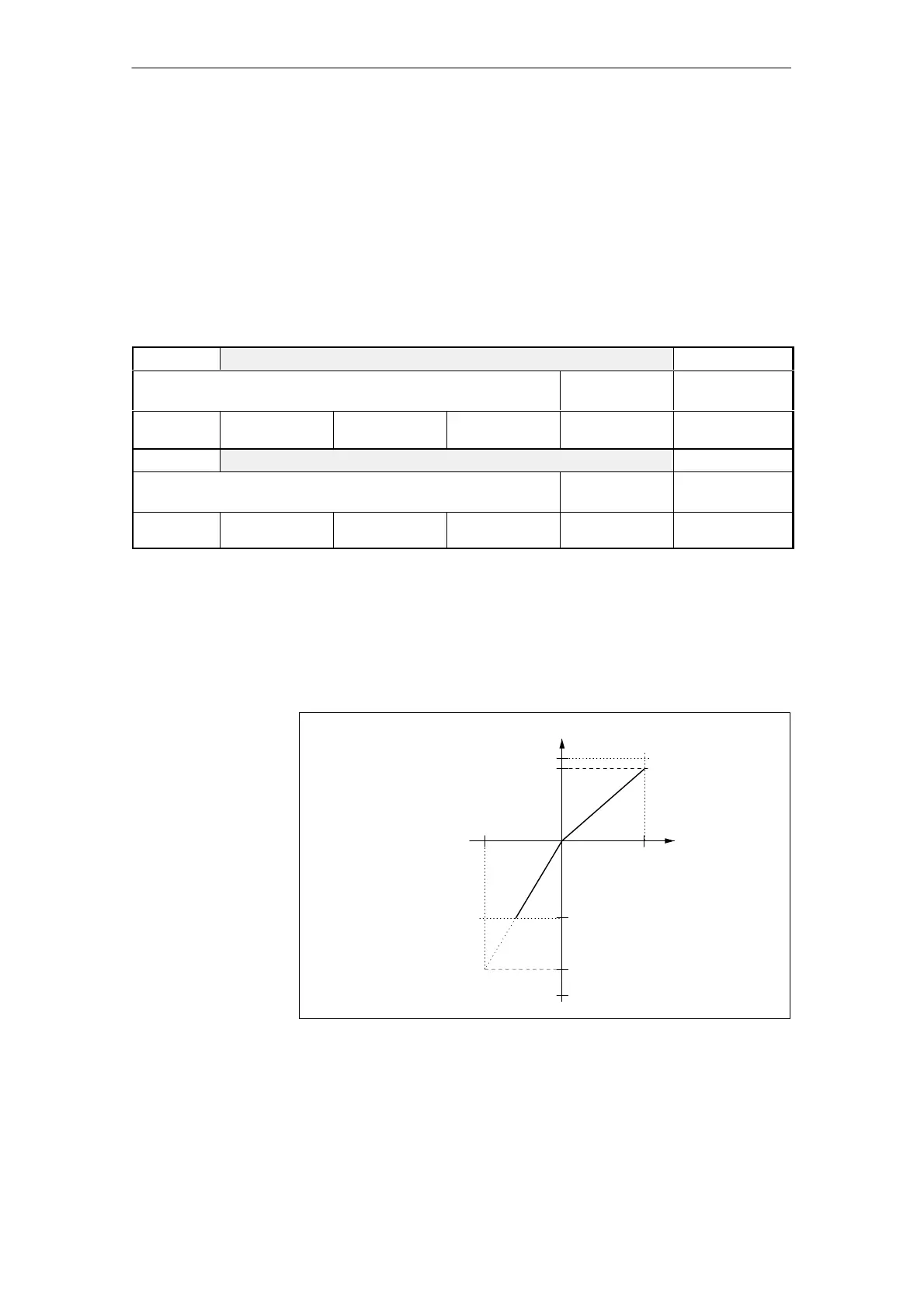
In order to compensate the direction-dependent controlled-system gain on dif-
ferential cylinders, a characteristic with a gradient that is variable as a function
of direction has been implemented. Fig. 4-14 shows a sample characteristic and
illustrates how the associated machine data works. In practice, only one of the
two gradients is weighted with a factor not equal to 100%. Normally, it is the
gradient that causes the cylinder piston to travel out that is weighted with a fac-
tor of less than 100% (see also Subsection 2.3.1 and Appendix A).
100%
100%
-100%
-100%
Output
Input
MD 5462
- MD 5463
-200%
0
Fig. 4-14 Example of piston surface adaptation characteristic
Area adaptation
4 Firmware Drive Functions
 Loading...
Loading...





