10.03
3.9 Fine adjustment and optimization
3-68
Siemens AG, 2003. All rights reserved
SINUMERIK 840D/SIMODRIVE 611 digital, HLA Module (FBHLA) - 10.03 Edition
3.9.5 Controller optimization
The most important travel motions are implemented via the feedforward control
path.
The function of the controller parameters is to damp the oscillation characteris-
tics of the valve/cylinder grouping.
In this respect, we distinguish between three different scenarios relating to the
corner frequency (f):
1. f
valve
<< f
cylinder
(f
)
The valve cannot actively influence any cylinder frequency that is higher
than the valve corner frequency.
Disturbances with frequencies f
St
> f
valve
cannot be damped.
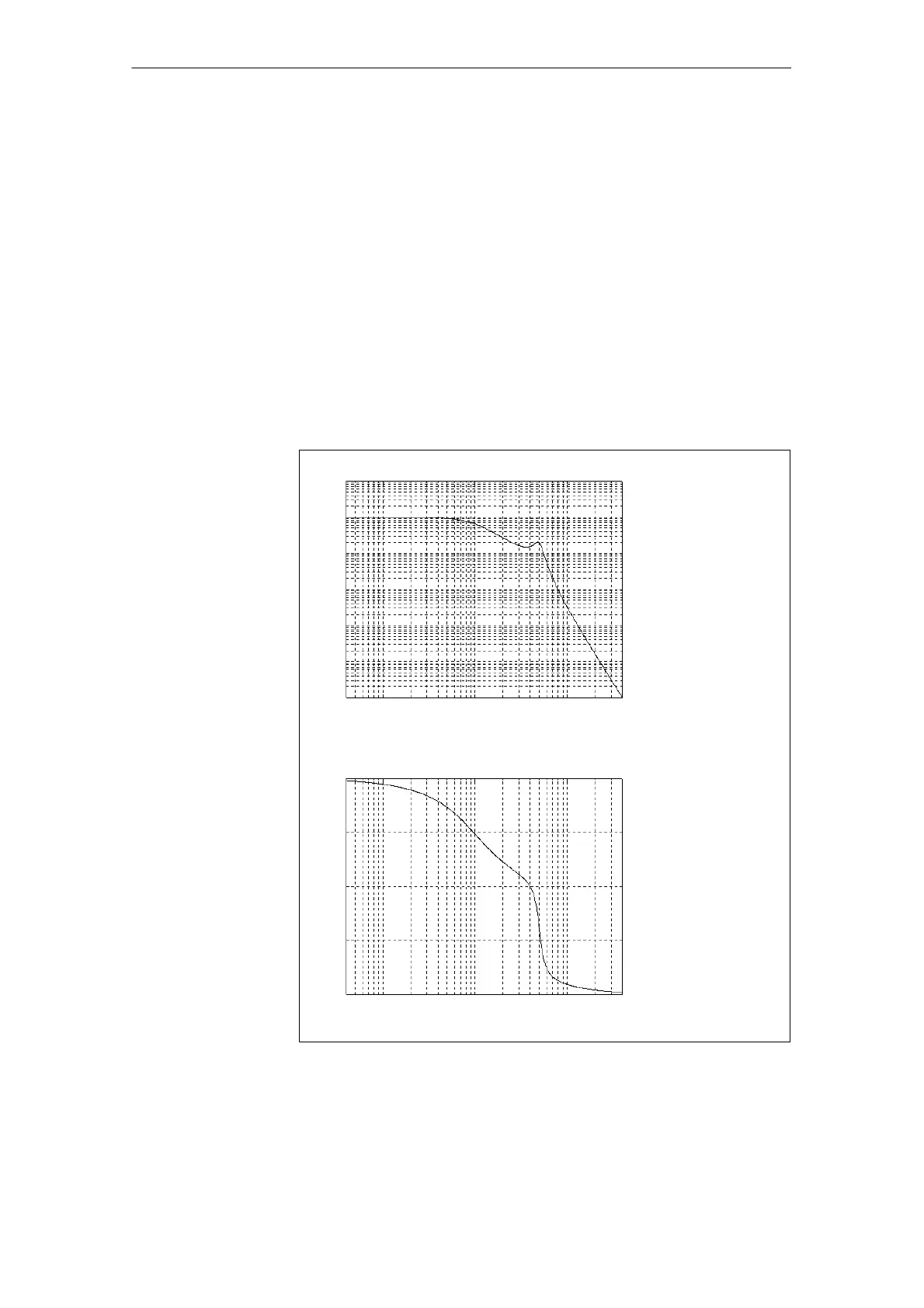
Valve:
fv=100 Hz; Dv=0.8
Drive:
fa=500 Hz; Da=0.1
Amplitude log frequency curve
Phase frequency curve
log f
log f
10
1
10
2
10
3
10
1
10
1
10
2
10
3
10
0
10
-1
10
-2
10
-3
10
-4
10
-5
-90
-180
-270
Phase angle log value
Fig. 3-22 Frequency response of controlled system (f
valve
<< f
cylinder
)
General
02.99
 Loading...
Loading...





