A-239
Siemens AG, 2003. All rights reserved
SINUMERIK 840D/SIMODRIVE 611 digital, HLA Module (FBHLA) - 10.03 Edition
Hydraulics
A.1 Servo solenoid valves
A.1.1 General
The servo solenoid valve is the final control element in the electro-hydraulic
control loop. It converts the electrical manipulated variable U=-10...+10 V into
the hydraulic variables pressure p and flow rate Q, and thus into a cylinder
movement.
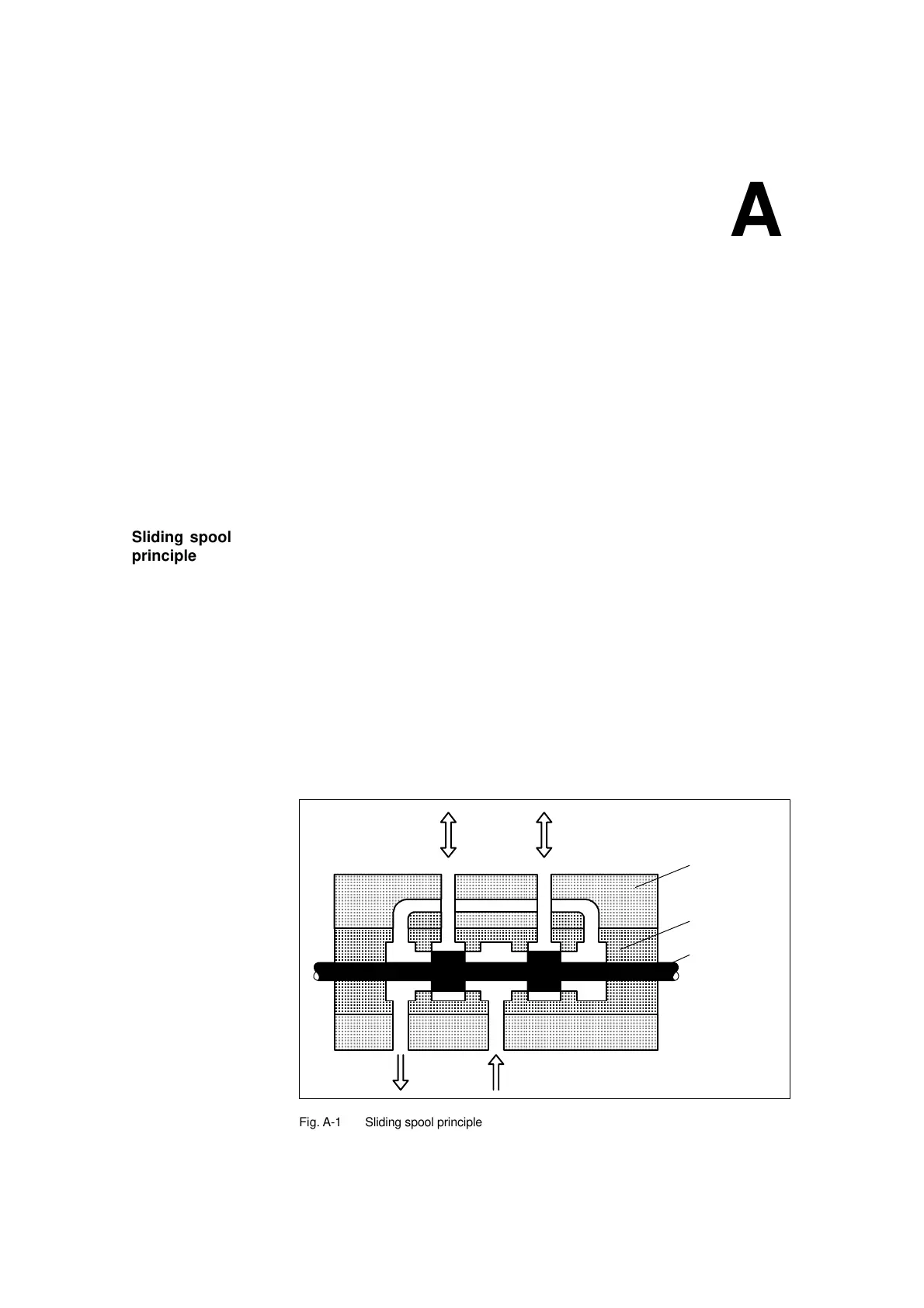
These valves are of the sliding-spool type. A valve spool with 4 control edges
moves inside a steel sleeve, the control bore of which is connected to the
4 ports in the valve casing. The main stages of pilot-controlled valves do not
typically have the steel sleeve, in which case the control geometry is repre-
sented directly by the valve casing.
The ports in the valve casing are:
S P: Pressure port (inlet)
S T: Tank port (return)
S A and B: Working ports (cylinder)
The valve spool slides steplessly through 3 switching positions (continuous
valve).
OB
TP
Casing
Steel sleeve
Valve spool
Fig. A-1 Sliding spool principle
Sliding spool
principle
A

 Loading...
Loading...




