10.03
4.3 Closed-loop velocity control
4-106
Siemens AG, 2003. All rights reserved
SINUMERIK 840D/SIMODRIVE 611 digital, HLA Module (FBHLA) - 10.03 Edition
5460 FRICTION_COMP_GRADIENT Cross reference: -
Gradient of friction compensation characteristic Related to:
HLA
Protection level:
3/3
Unit:
%
Default:
0.0
Minimum:
0.0
Maximum:
400.0
Data type:
FLOAT
Active:
Immediately
5461 FRICTION_COMP_OUTPUT_RANGE Cross reference: -
Effective range of friction compensation (at output) Related to:
HLA
Protection level:
3/3
Unit:
%
Default:
0.1
Minimum:
0.1
Maximum:
10.0
Data type:
FLOAT
Active:
Immediately
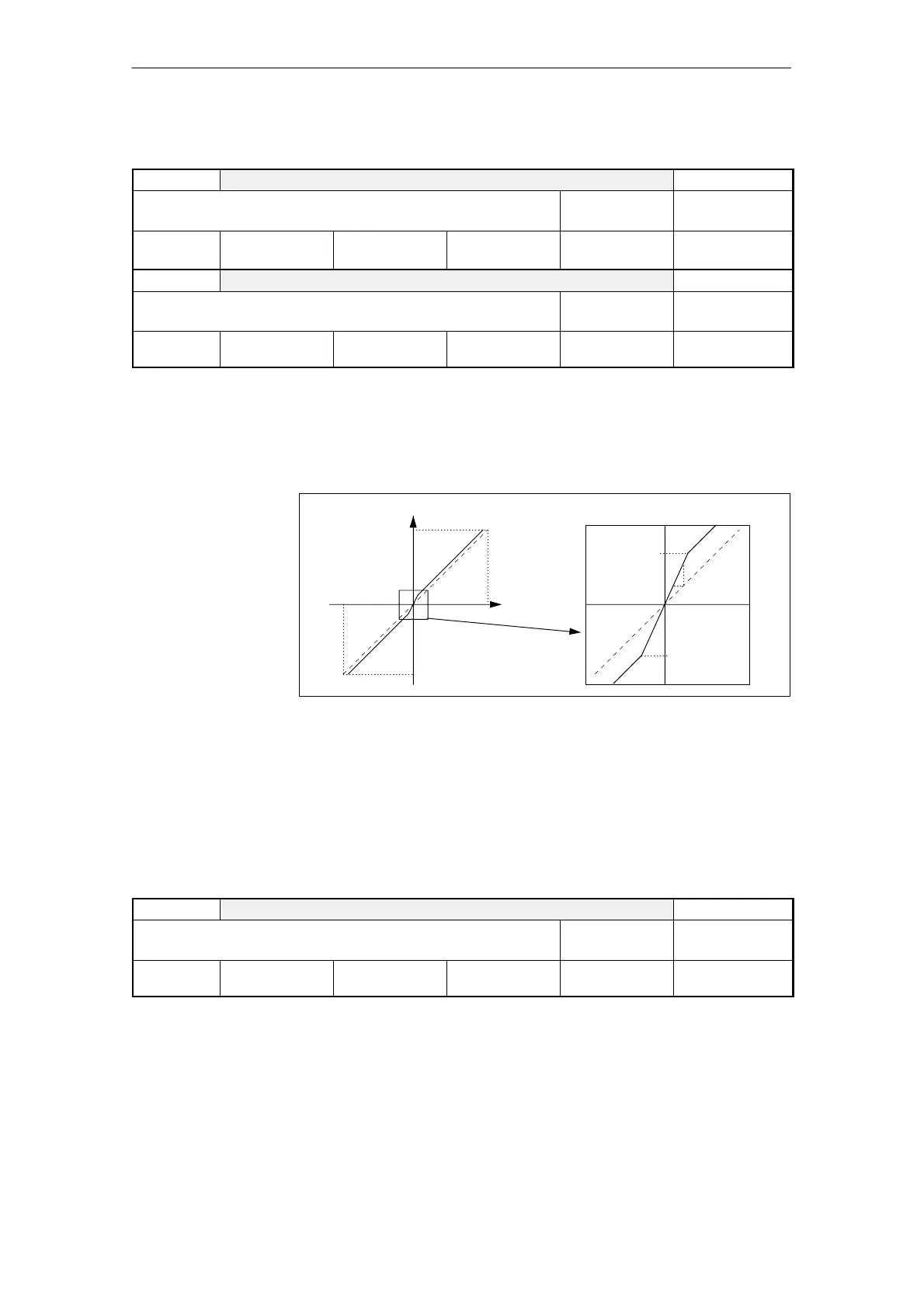
In order to reduce the effects of friction, the characteristic gradient is made
steeper around the zero point in the flow rate feedforward control path (see
Fig. 4-2). The differential pressure is thus boosted with the velocity setpoint
sign. Fig. 4-10 shows an example of this characteristic and the way that the
associated machine data works (see also Subsection 2.3.1 and Appendix A).
100%
100%
-100%
-100%
MD 5460
MD 5461
Input
Output
- MD 5461
Fig. 4-10 Friction compensation characteristic; see also static friction injection
in Subsection 4.4.2.
4.3.2 Velocity controller
Sampling time with which the velocity control loop is calculated.
5001 SPEEDCTRL_CYCLE_TIME Cross reference: -
Velocity controller cycle Related to:
HLA
Protection level:
3/3
Unit:
31.25 µs
Default:
4
Minimum:
2
Maximum:
16
Data type:
UNS.WORD
Active:
Power On
S Short cycle:Good dynamic response, but measurement noise from actual
velocity increases.
S Long cycle: Poor dynamic response, actual velocity values are not noisy
Friction
Velocity controller
cycle
4 Firmware Drive Functions
02.99

 Loading...
Loading...




