10.03
3.9 Fine adjustment and optimization
3-63
Siemens AG, 2003. All rights reserved
SINUMERIK 840D/SIMODRIVE 611 digital, HLA Module (FBHLA) - 10.03 Edition
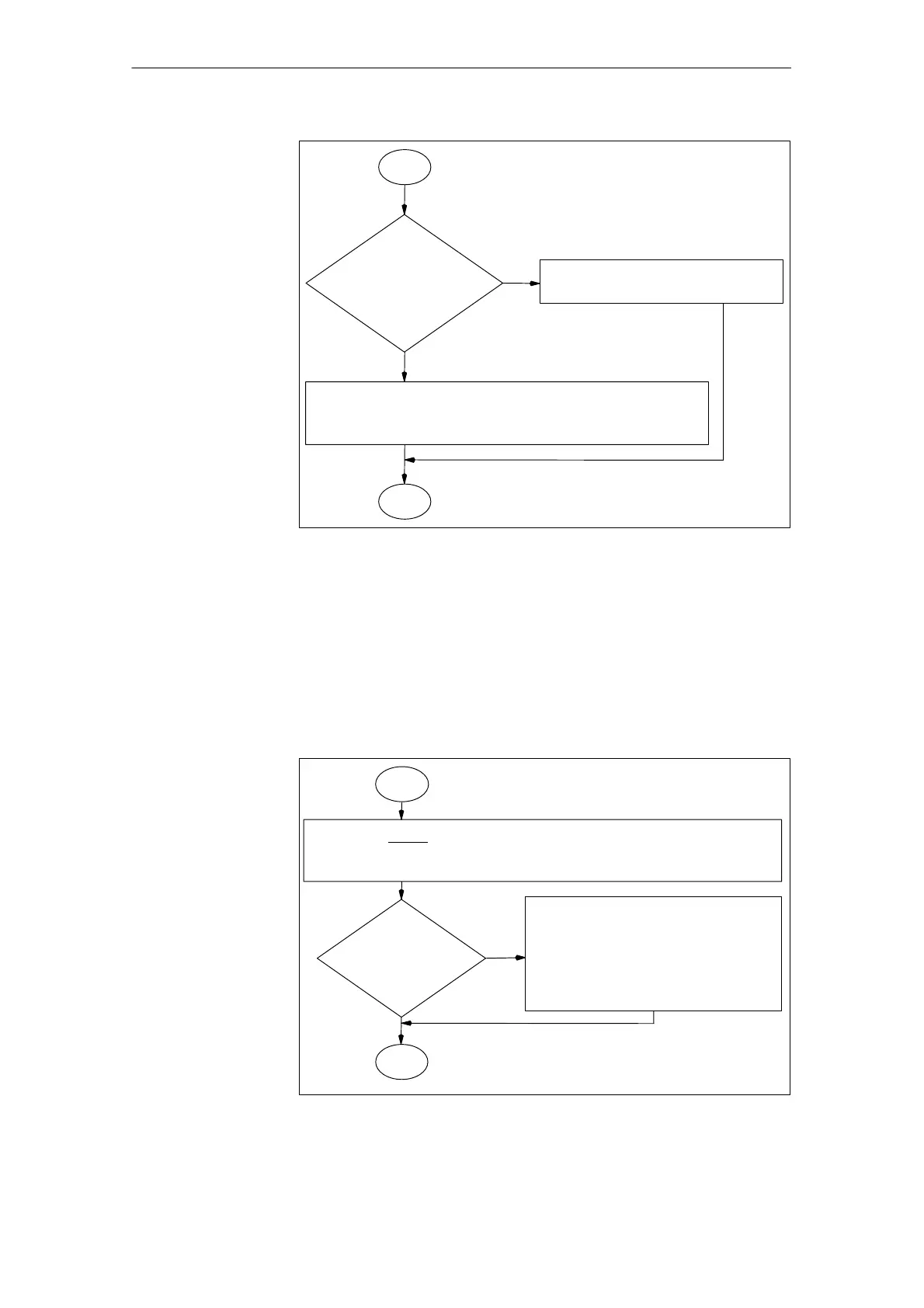
MD 32110: Modify ENC_FEEDBACK_POL (actual value sign)
or MD 5476: Invert OUTPUT_VOLTAGE_INVERSION (manip. variable
inversion) and MD 5011: invert ACTUAL_VALUE_CONFIG (actual value
sensing)
Step 2
MD 5476: Invert
OUTPUT_VOLTAGE_INVERSION (manip.
variable inversion)
no
yes, but fails with error message
Do MD 5706 and
MD 5707 (v
set
, v
act
)
have the same sign
when the drive
starts?
Start
Fig. 3-17 Start-up flow chart, determine control direction
When the cylinder piston moves in the A ³ B direction (flow rate Q > 0) , the
actual velocity value V
act
must be positive.
This definition MUST be made in the drive for the associated functionality of
S velocity controller adaptation and
S force limitation
absolutely essential.
Enter a small positive valve manipulated voltage (function generator)
or
traverse the drive in JOG mode to move the cylinder piston from the A to B end.
no
Yes
Is cylinder
piston A ! B traversing
and is MD 5707
positive?
Step 3
Step 2
MD 5476: OUTPUT_VOLTAGE_INVERSION
Modify bit 0 (invert manipulated variable)
and
MD 5011: ACTUAL_VALUE_CONFIG Modify
bit 0 (invert actual value)
and
MD 32110: ENC_FEEDBACK_POL
(actual value sign)
(adjust sign of actual velocity value)
Fig. 3-18 Start-up flow chart, definition of drive travel direction
Definition of drive
travel direction
(step 2)
 Loading...
Loading...





