6.5.3 Default tread system parameters
Parameter Description Value
Counts Per Meter The pulses per meter of the encoder.
Usually encoder calibration is started by the PLC.
xxxx mm
Mechanical Gain The quotient of distance pivot point to the center
of the B&T drum when tread conveyor is in apply
position and distance to the end of the conveyor
and the pivot point, times 1000.
Refer to How to measure the mechanical gain for
a tread server on page 6
‑
24.
X
(´1000)
Camera To
End Conveyor
distance
The distance between the camera and axis of the
conveyor belt turn.
Refer to How to measure the camera to end
conveyor distance on page 6
‑
25.
xxxx mm
Obstruction Width The size of the conveyor belt in the center of the
camera. Everything smaller than this threshold
will not be seen by the camera.
xxx mm
Template Width The calibration template width for 2 camera
system calibration.
xxxx mm
Width Offset The calibration offset camera to servicer.
Only applicable in 2 camera systems!
Difference between the center of the camera(s)
field of view and the drum.
0 mm
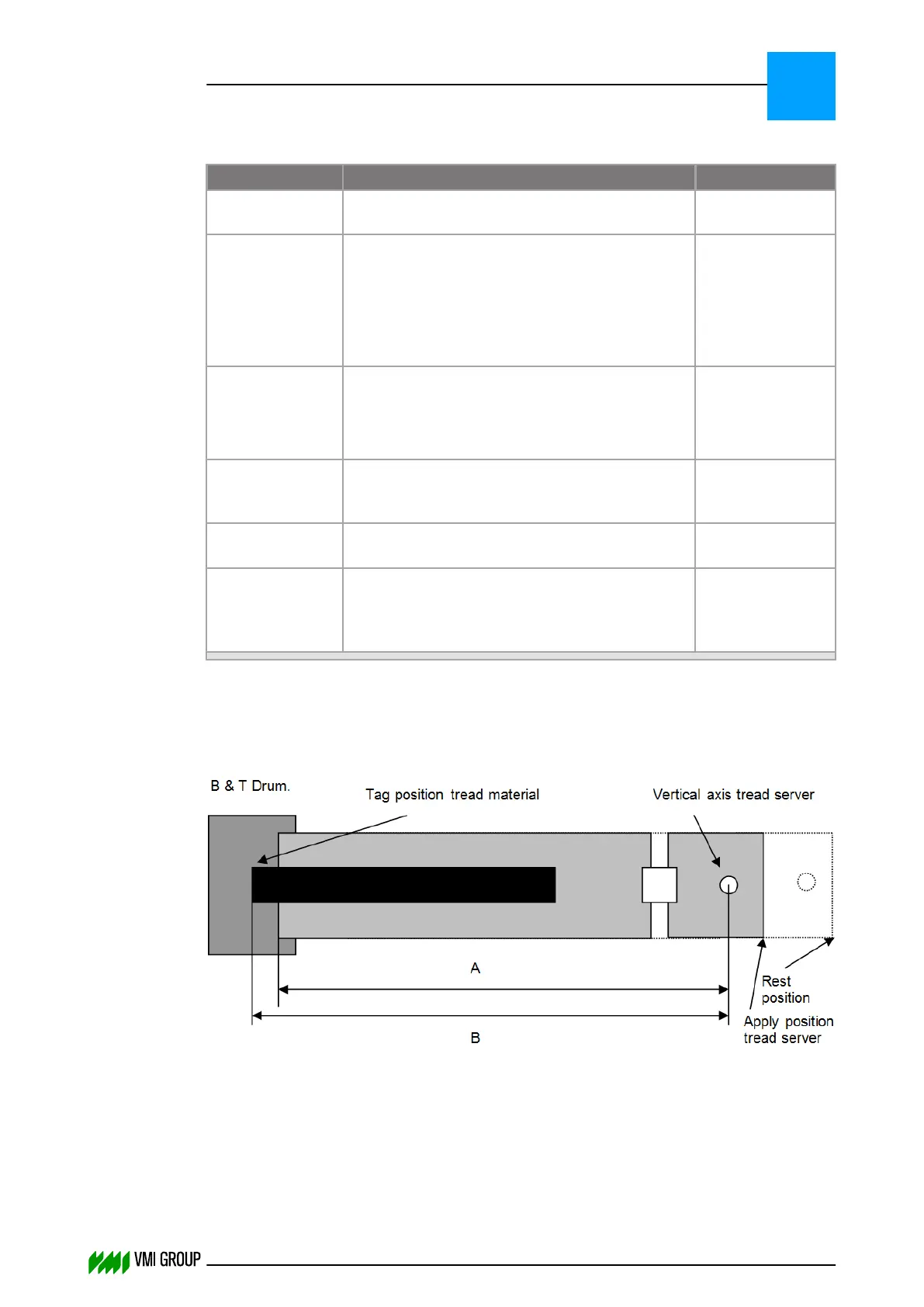
6.5.3.1 How to measure the mechanical gain for a tread server
The illustration shows the mechanical gain as the quotient of two measurements
(1000 x A/B).
PARAMETERS
System parameters
6
THINKING FORWARD
VMI Vision System VVS (OL82) VVSX 13.0.12.0, VVSU 3.0.6 / 4 / 2016-07-11 / pd#175592
6-24