31.
If necessary, adjust the homing sensor.
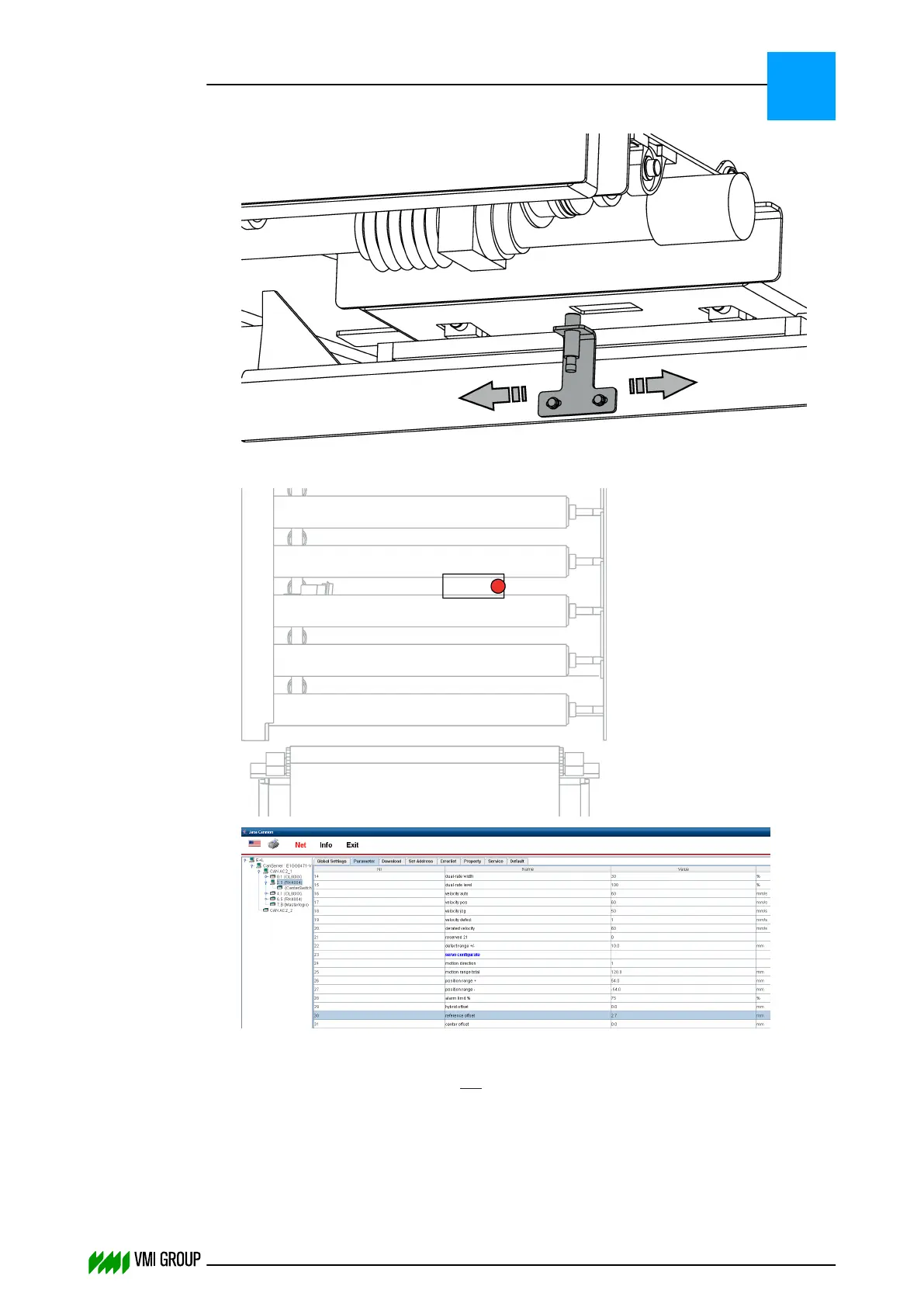
Bottom view with position of sensor in respect to the hole:
32.
In Java Canmon, check if the homing sensor reference offset is between 2 and
3 mm.
If the homing sensor position is not within the given tolerance repeat the procedure
from step 19 (determine the motor type).
33. Before checking the actuator calibration, make sure the breaker offset parameters are
set to zero.
34. In VVSU, go to tab ACTUATOR.
35. Change the value of Zero Offset to 10 and press ENTER.
ALIGNMENTS, ADJUSTMENTS AND CALIBRATIONS
VVS Breaker
5
THINKING FORWARD
VMI Vision System VVS (OL82) VVSX 13.0.12.0, VVSU 3.0.6 / 4 / 2016-07-11 / pd#175592
5-20