5.14 Motor Stopping Methods for Servo OFF and Alarms
5.14.2 Servomotor Stopping Method for Alarms
5-44
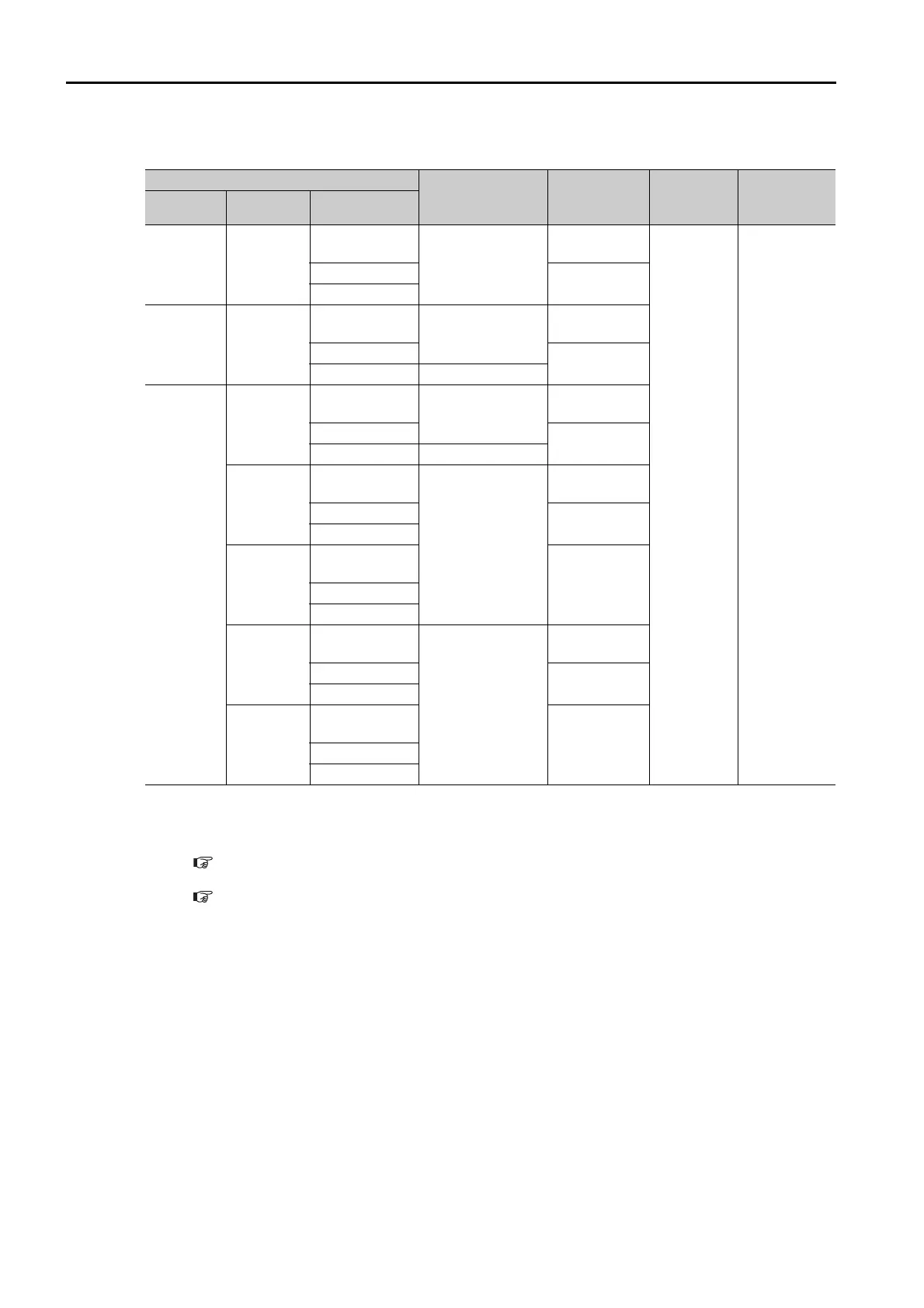
The following table shows the combinations of the parameter settings and the resulting stop-
ping methods.
Note: 1. The setting of Pn00A is ignored if Pn001 is set to n.0 or n.1.
2. The setting of Pn00A = n.X is enabled for position control and speed control. During torque control,
the setting of Pn00A = n.X will be ignored and only the setting of Pn001 = n.X will be used.
3. Refer to the following section for details on Pn406 (Emergency Stop Torque).
Stopping the Servomotor by Setting Emergency Stop Torque on page 5-34
4. Refer to the following section for details on Pn30A (Deceleration Time for Servo OFF and Forced Stops).
Stopping the Servomotor by Setting the Deceleration Time on page 5-34
Parameter
Servomotor
Stopping Method
Status after
Servomotor
Stops
When
Enabled
Classification
Pn00B Pn00A Pn001
n.0
(default
setting)
–
n.
0
(default setting)
Zero-speed stop-
ping
Dynamic
brake
After restart Setup
n.1
Coasting
n.2
n.
1 –
n.
0
(default setting)
Dynamic brake
Dynamic
brake
n.
1
Coasting
n.2 Coasting
n.2
n.0
(default
setting)
n.
0
(default setting)
Dynamic brake
Dynamic
brake
n.
1
Coasting
n.2 Coasting
n.
1
n.
0
(default setting)
Motor is deceler-
ated using the
torque set in
Pn406 as the
maximum torque.
Dynamic
brake
n.
1
Coasting
n.2
n.
2
n.
0
(default setting)
Coasting
n.1
n.2
n.
3
n.
0
(default setting)
Motor is deceler-
ated according to
setting of Pn30A.
Dynamic
brake
n.
1
Coasting
n.2
n.
4
n.
0
(default setting)
Coasting
n.1
n.2
 Loading...
Loading...




