6.6 Position Control
6-29
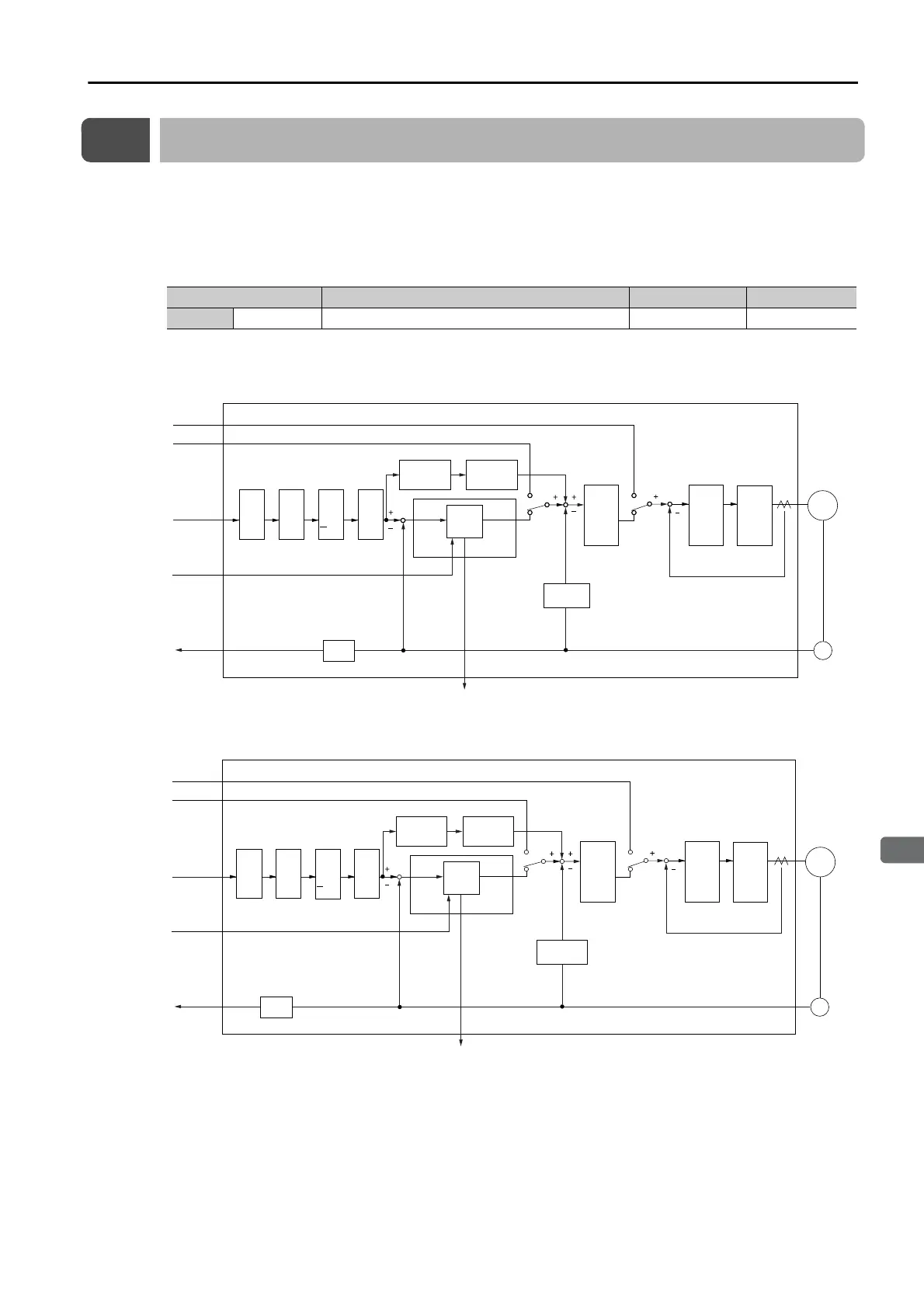
6.6
Position Control
Position control is used to input a pulse train reference from the host controller to the SERVO-
PACK to move to a target position. The position is controlled with the number of input pulses,
and the speed is controlled with the input pulse frequency. Use position control when position-
ing is required.
You set the control method to position control in Pn000 = n.X (Control Method Selection).
The control block diagrams for position control are provided below.
• Rotary Servomotors
• Linear Servomotors
Parameter Meaning When Enabled Classification
Pn000 n.1 Position Control After restart Setup
Pn10A
ENC
M
Pn000
= n.
X
Pn000
= n.
X
Pn200
= n.
X
Pn218
Pn109
Pn20E
Pn210
COIN
Pn212
Pn216
Pn217
SERVOPACK
Torque
reference
Speed
reference
Position
reference
Refer-
ence
pulse
form
Refer-
ence
pulse
input
n
Elec-
tronic
gear
B
A
Smo-
othing
Deviation
counter
Speed
control
section
Current
control
section
Power
amplier
Servomotor
Current feedback
Feedforward
Feedforward
lter time
constant
Clear
signal input
Encoder
divided pulse
output
Divider
Speed
conversion
Position
feedback
Pn522 (Positioning
Completed Width)
Speed feedback
Position
control section
Pn10A
ENC
M
Pn000
= n.
X
Pn000
= n.
X
Pn109
COIN
Pn281
Pn216
Pn217
Pn200
= n.
X
Pn218 Pn20E
Pn210
SERVOPACK
Feedforward
Feedforward
lter time
constant
Deviation
counter
Position
control section
Position
feedback
Pn522 (Positioning
Completed Width)
Speed feedback
Speed
control
section
Current
control
section
Power
amplier
Servomotor
Linear
encoder
Current feedback
Force
reference
Speed
reference
Position
reference
Clear signal
input
Encoder
divided pulse
output
Divider
Refer-
ence
pulse
form
Refer-
ence
pulse
input
n
Speed
conversion
Elec-
tronic
gear
B
A
Smo-
othing

 Loading...
Loading...



