6.5 Speed Control
6.5.6 Operation Examples for Changing the Motor Direction
6-27
6.5.6
Operation Examples for Changing the Motor Direction
This section describes examples of using the /SPD-D (Motor Direction Input) signal in combina-
tion with zero clamping and internal set speed control.
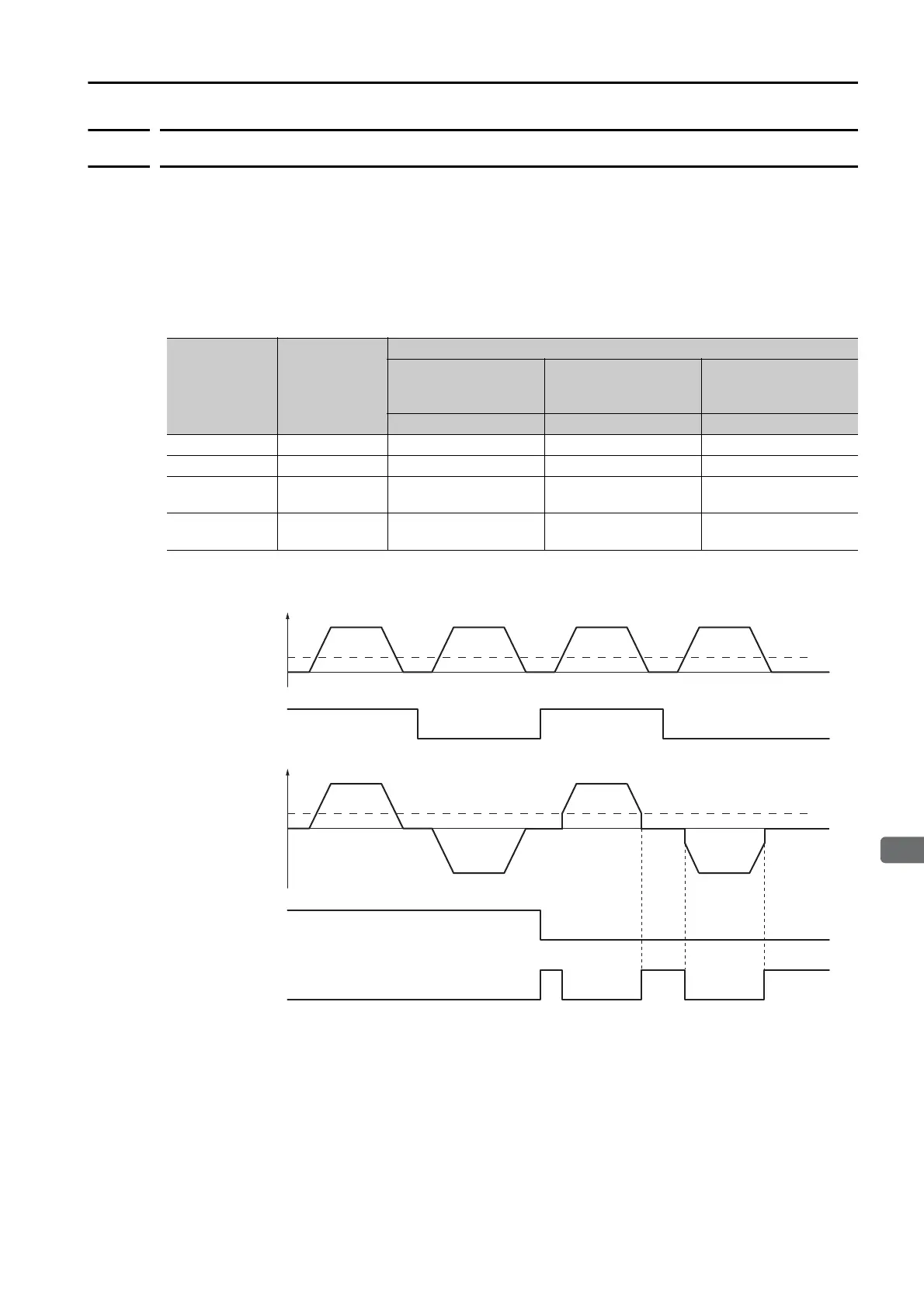
Operation Example for Changing the Motor Direction and
Zero Clamping
This section provides an example of changing the motor direction without changing the polarity
of the speed reference voltage by using the /SPD-D (Motor Direction Input) signal.
* Pn501 (Zero Clamping Level): Used with a Rotary Servomotor.
Pn580 (Zero Clamping Level): Used with a Linear Servomotor.
Note: The soft start function is used for the acceleration/deceleration time of the speed reference.
/ZCLAMP /SPD-D
Polarity of Analog Speed Reference Voltage
Positive
Zero Clamping Level
or Lower ((Pn501
(Pn580))*
Negative
Rotation Direction Operating Status Rotation Direction
OFF OFF CCW Speed Control CW
OFF ON CW Speed Control CCW
ON OFF CCW
Servo lock
(clamped to zero)
CW
ON ON CW
Servo lock
(clamped to zero)
CCW
Released
OFF
Applied
Applied
ON
Applied
OFF ON OFF ON
Pn501
(Pn580)
Released Released
Zero clamping
/ZCLAMP input signal
/SPD-D input signal
Speed reference
input voltage
Reference voltage
Motor speed
SERVOPACK internal
speed reference
Pn501
(Pn580)