8.6 Autotuning without Host Reference
8.6.5 Troubleshooting Problems in Autotuning without a Host Reference
8-31
8.6.5
Troubleshooting Problems in Autotuning without a Host
Reference
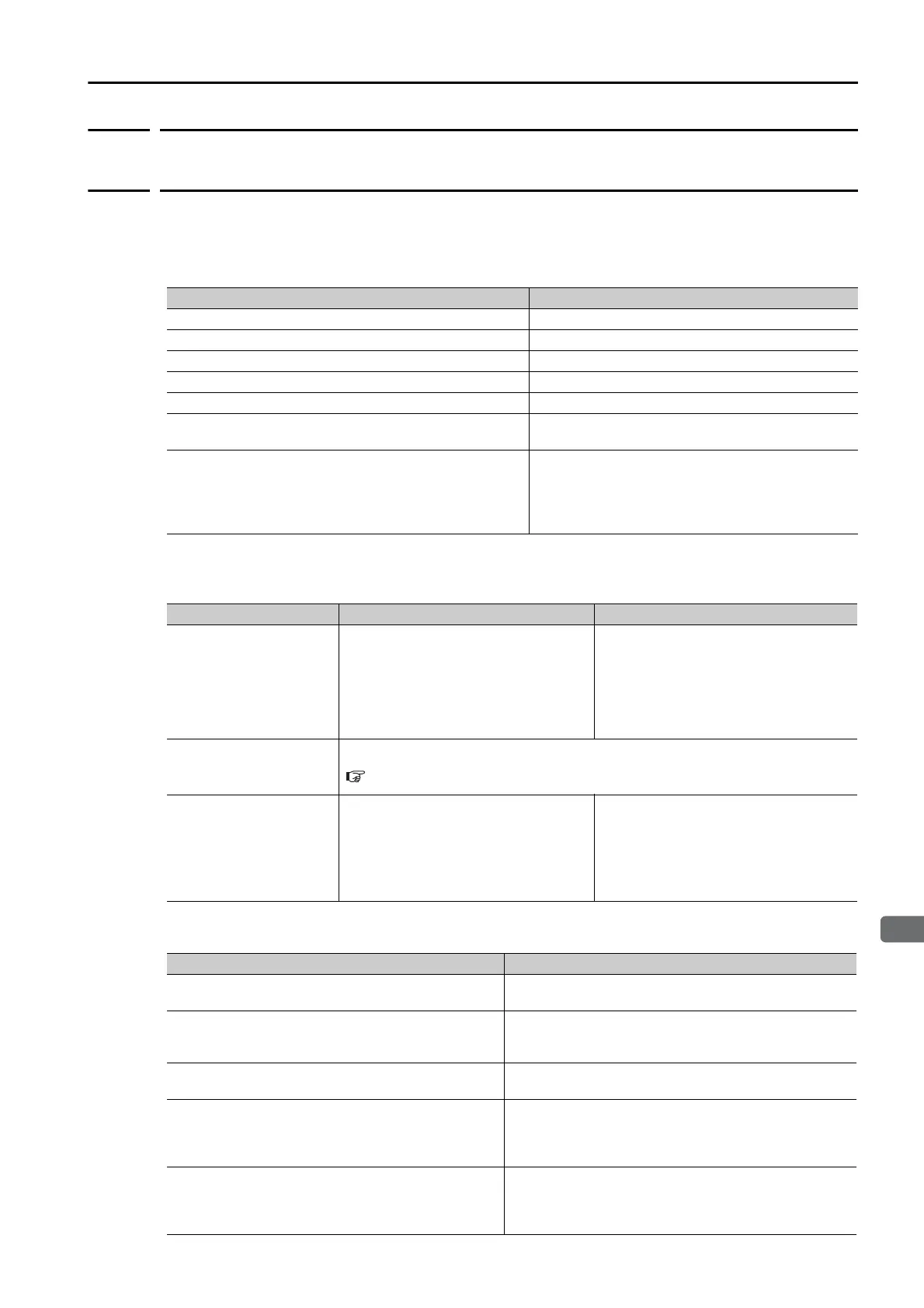
The following tables give the causes of and corrections for problems that may occur in autotun-
ing without a host reference.
Autotuning without a Host Reference Was Not Performed
When an Error Occurs during Execution of Autotuning without a Host
Reference
When an Error Occurs during Calculation of Moment of Inertia
Possible Cause Corrective Action
Main circuit power supply is OFF. Turn ON the main circuit power supply.
An alarm or warning occurred. Remove the cause of the alarm or warning.
Overtraveling occurred. Remove the cause of overtraveling.
The second gains were selected with the gain selection. Disable automatic gain switching.
The HWBB was activated. Release the HWBB.
The setting of the travel distance is too small.
Set the travel distance again in step 6 of the proce-
dure.
The settings for the tuning-less function are not correct.
• Disable the tuning-less function (Pn170 =
n.0).
• Enable the tuning-less function (Pn170 =
n.1) and specify moment of inertia estima-
tion.
Error Possible Cause Corrective Action
The gain adjustments
were not successfully
completed.
Machine vibration occurs or the posi-
tioning completion signal is not stable
when the Servomotor stops.
• Increase the setting of the positioning
completed width (Pn522).
• Change the mode from 2 to 3.
• If machine vibration occurs, suppress
the vibration with the anti-resonance
control function and the vibration sup-
pression function.
An error occurred during
calculation of the
moment of inertia.
Refer to the following section for troubleshooting information.
When an Error Occurs during Calculation of Moment of Inertia on page 8-31
Positioning was not
completed within
approximately 10 sec-
onds after position
adjustment was com-
pleted.
The positioning completed width is too
narrow or proportional control is being
used.
• Increase the setting of the positioning
completed width (Pn522).
• Tur n OFF the /P-CON (Proportional
Control) signal.
Possible Cause Corrective Action
The SERVOPACK started calculating the moment of
inertia but the calculation was not completed.
• Increase the setting of the speed loop gain (Pn100).
• Increase the stroke (travel distance).
The moment of inertia fluctuated greatly and did not
converge within 10 tries.
Set Pn103 (Moment of Inertia Ratio) from the machine
specifications and specify not estimating the moment
of inertia.
Low-frequency vibration was detected.
Double the setting of moment of inertia calculation
starting level (Pn324).
The torque limit was reached.
• If you are using the torque limit, increase the torque
limit.
• Double the setting of moment of inertia calculation
starting level (Pn324).
The speed control section changed to proportional
control during calculation of the moment of inertia,
e.g., the /P-CON (Proportional Control) signal was
input.
Use PI control when calculating the moment of inertia.

 Loading...
Loading...



