6.12 Absolute Encoders
6.12.4 Reading the Position Data from the Absolute Encoder
6-78
Sequence for Reading the Position Data from the Absolute
Encoder without Using the SEN (Absolute Data Request) Signal
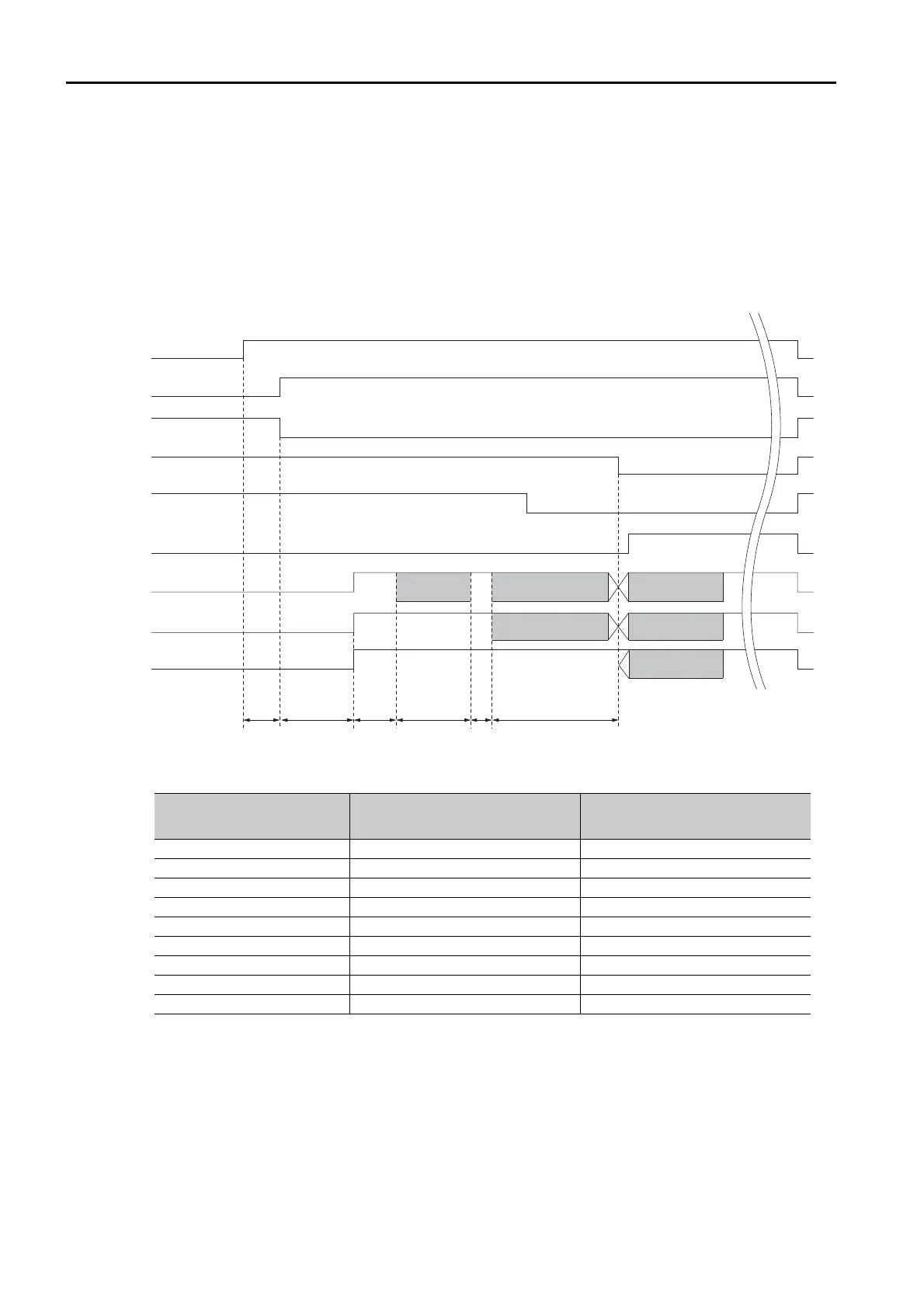
The sequence for reading the position data from the absolute encoder of a Rotary Servomotor without
using the SEN signal is given below.
When the specified time has elapsed after the control power supply to the SERVOPACK is turned ON,
the SERVOPACK will automatically read the position data from the absolute encoder.
The position data from the absolute encoder is sent according to the transmission specifications.
The position of the absolute encoder within one rotation is output as a pulse train.
*
The pulse output time T for the position of the absolute encoder within one rotation depends on the setting of Pn212
(Number of Encoder Output Pulses). Refer to the following table.
Setting of Pn212
Calculation of the Pulse Output Speed
for the Position of the Absolute
Encoder within One Rotation
Calculation of the Pulse Output Time T
for the Position of the Absolute
Encoder within One Rotation
16 to 16,384 680 × Pn212/16,384 [kpps] 25 ms max.
16,386 to 32,768 680 × Pn212/32,768 [kpps] 50 ms max.
32,722 to 65,536 680 × Pn212/65,536 [kpps] 100 ms max.
65,544 to 131,072 680 × Pn212/131,072 [kpps] 200 ms max.
131,088 to 262,144 680 × Pn212/262,144 [kpps] 400 ms max.
262,176 to 524,288 680 × Pn212/524,288 [kpps] 800 ms max.
524,352 to 1,048,576 680 × Pn212/1,048,576 [kpps] 1,600 ms max.
1,048,704 to 2,097,152 680 × Pn212/2,097,152 [kpps] 3,200 ms max.
2,097,408 to 4,194,304 680 × Pn212/4,194,304 [kpps] 6,400 ms max.
Power supplied.
Main circuit
power supply
Control power
supply
/S-RDY signal
ALM signal
/S-ON signal
PAO signal
PBO signal
PSO signal
Motor power status
Multiturn
data
Incremental pulses
Incremental pulses
ON
OFF
OFF
ON
ONOFF
ONOFF
Power not supplied.
Undened.
Undened.
Undened.
5 s max.
50 ms
Approx. 15 ms
1 ms to 3 ms
T
*
90 ms
typ.
No alarm
Position within one rotation
(incremental pulses)
Position within one rotation
(incremental pulses)
Multiturn data + position
within one rotation
 Loading...
Loading...




