6.13 Absolute Linear Encoders
6.13.4 Reading the Position Data from the Absolute Linear Encoder
6-90
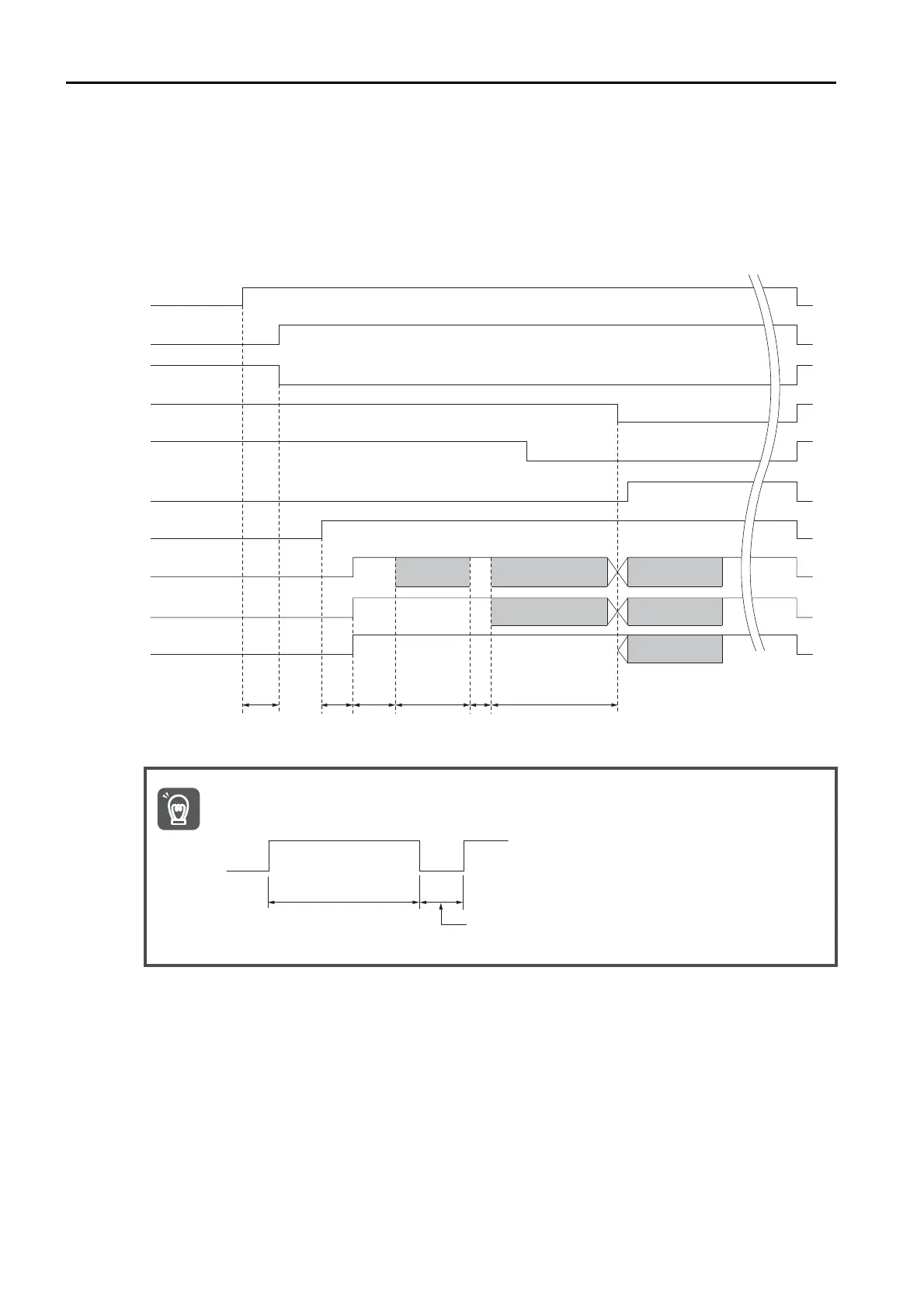
Sequence for Reading the Position Data from the Absolute
Linear Encoder Using the SEN (Absolute Data Request) Signal
The sequence for using the SEN signal to read the position data from the absolute linear encoder of a
Linear Servomotor is given below.
The upper 16-bit position data (with sign) are sent according to the transmission specifications.
The lower 20-bit data is output as a pulse train.
*
When you turn OFF the control power supply, turn OFF the SEN signal.
•
Maintain the SEN signal at the high level for at least 1.3 seconds when you turn it OFF before you
turn it ON again, as shown in the following figure.
•
The SEN signal is not acknowledged while the servo is ON.
Power supplied.
Main circuit
power supply
Control power
supply
*
/S-RDY signal
ALM output signal
/S-ON signal
SEN signal
*
PAO signal
PBO signal
PSO signal
Motor power status
Lower 20-bit position data
(incremental pulses)
Lower 20-bit position data
(incremental pulses)
Incremental pulses
Incremental pulses
ON
OFF
OFF
ON
No alarm
ONOFF
ONOFF
Power not supplied.
ONOFF
Undened.
Undened.
Undened.
5 s max.
50 ms
Approx. 15 ms
1 ms to 3 ms
400 ms max.
90 ms
typ.
Upper 16-bit position
data (with sign)
Signed 36-bit
position data
Important
OFF ON (high level)
1.3 s min.
OFF ON
15 ms min.
SEN signal