10.3 Parameter Settings for Fully-Closed Loop Control
10.3.7 Alarm Detection Settings
10-9
10
Fully-Closed Loop Control
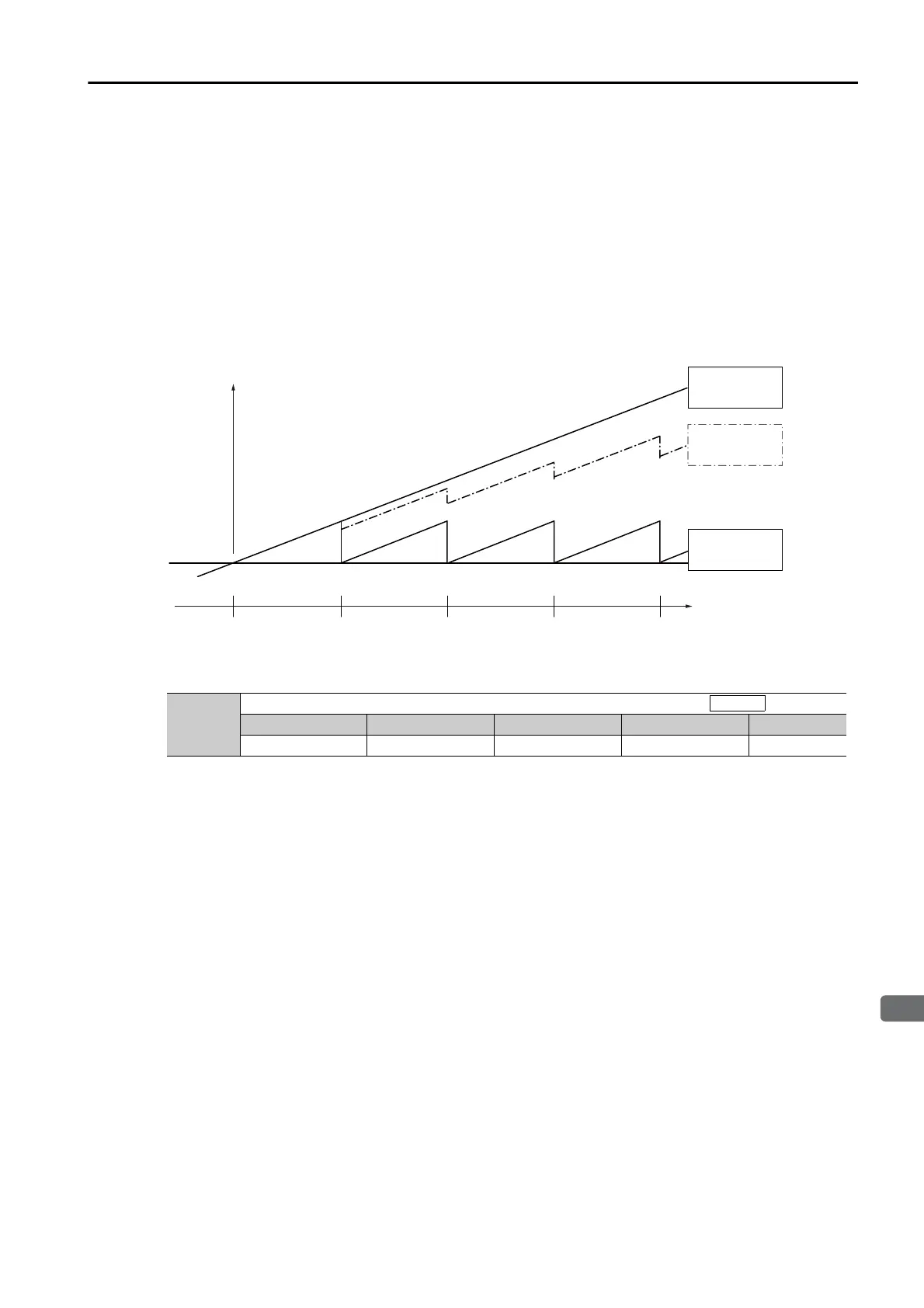
Pn52A (Multiplier per Fully-closed Rotation)
Set the coefficient of the deviation between the motor and the external encoder per motor rota-
tion.
This setting can be used to prevent the motor from running out of control due to damage to the
external encoder or to detect belt slippage.
Setting Example
Increase the value if the belt slips or is twisted excessively.
If this parameter is set to 0, the external encoder value will be read as it is.
If you use the default setting of 20, the second rotation will start with the deviation for the first
motor rotation multiplied by 0.8.
Related Parameters
Pn52A
Multiplier per Fully-closed Rotation
Setting Range Setting Unit Default Setting When Enabled Classification
0 to 100 1% 20 Immediately Setup
Pn52A = 0
Pn52A = 100
Pn52A = 20
Deviation between motor and external encoder
Large
Motor speed
4th rotation3rd rotation
1st rotation
2nd rotation
Small

 Loading...
Loading...



