6.1 Alarm Displays
6.1.2 Troubleshooting Alarms
6-33
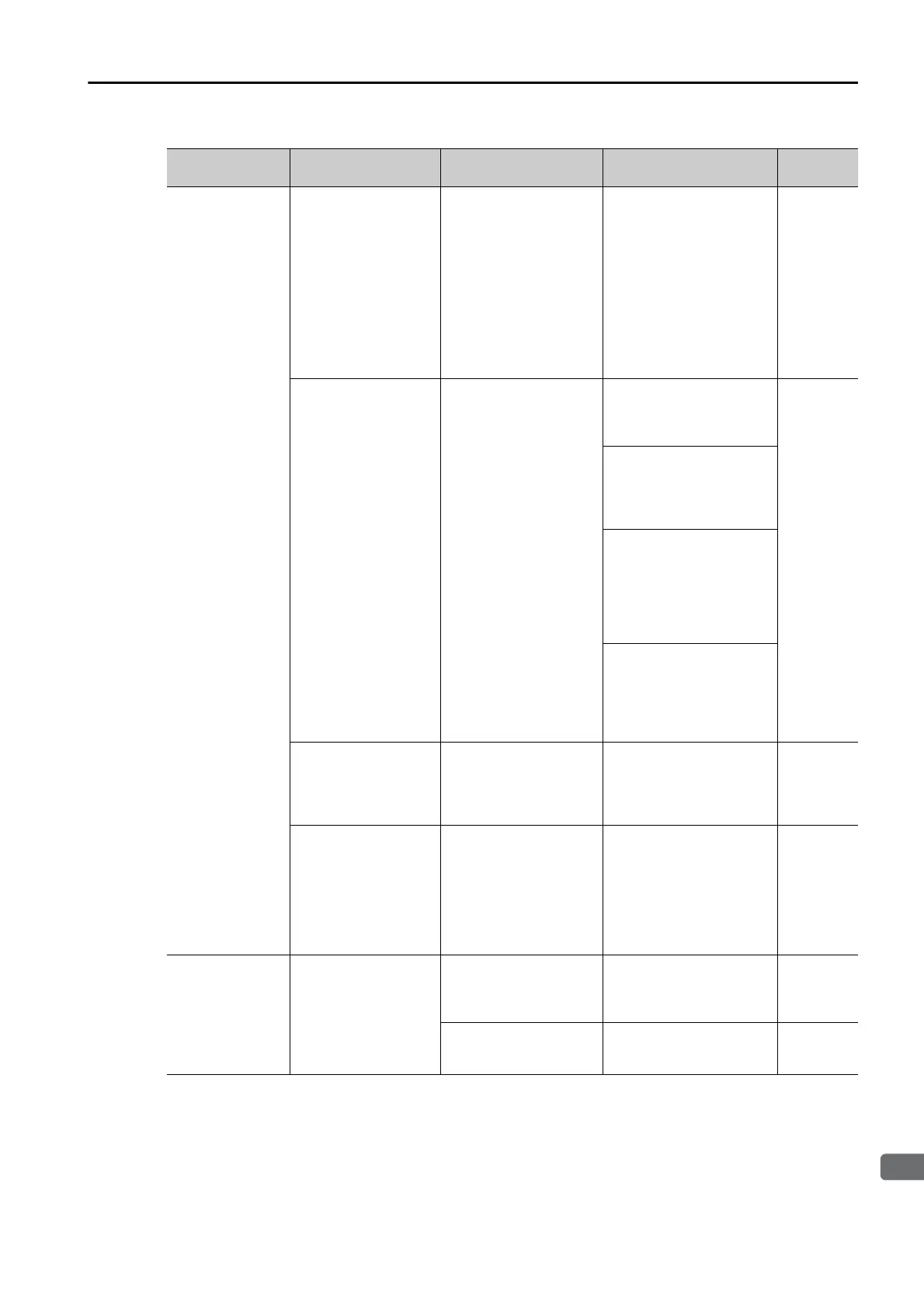
A.E94:
Position Correc-
tion Table
Setting Error
The data set in the
Position Correction
Tab le ( p re -co rrect ion
positions and correc-
tion amounts) is cor-
rupted.
Check the pre-correc-
tion positions and cor-
rection amounts in the
Position Correction
Table.
Initialize the Position Cor-
rection Table.
Restart the SERVOPACK
after initialization. If it
starts normally, set the
Position Correction Table
again.
If the SERVOPACK does
not start normally after ini-
tialization, it may be faulty.
Replace the SERVO-
PACK.
page 3-8
page 3-20
The Position Correc-
tion Table was set
with values outside
the setting range.
Check if the table
entries, pre-correction
positions, correction
amounts, correction
positions (pre-correc-
tion positions+correc-
tion amounts) have
exceeded the setting
ranges.
Set the number of Posi-
tion Correction Table
entries between 2 and
128.
page 3-7
Set pre-correction posi-
tions, correction amounts,
and correction positions
between -2,147,483,648
and 2,147,483,647.
Set the difference
between one pre-correc-
tion position and the fol-
lowing pre-correction
position between
-1,073,741,824 and
1,073,741,823.
Set the difference
between one correction
amount and the following
correction amount
between -1,073,741,824
and 1,073,741,823.
The pre-correction
positions in the Posi-
tion Correction Table
are not set in ascend-
ing order.
Check if the pre-correc-
tion positions are set in
ascending order.
Set the Position Correc-
tion Table so that the pre-
correction positions are in
ascending order.
page 3-7
The correction posi-
tions calculated from
the pre-correction
positions and correc-
tion amounts in the
Position Correction
Table are not in
ascending order.
Check if the correction
positions (pre-correc-
tion positions+correc-
tion amounts) are set in
ascending order.
Set the Position Correc-
tion Table so that the cor-
rection positions are in
ascending order.
page 3-7
A.Ed1:
Command Exe-
cution Timeout
A timeout error
occurred for a
MECHATROLINK
command.
Check the motor status
when the command is
executed.
Execute the SV_ON or
SENS_ON command only
when the motor is not
operating.
–
Check the encoder sta-
tus when the command
is executed.
Execute the SENS_ON
command only when an
encoder is connected.
–
Continued on next page.
Continued from previous page.
Alarm Number:
Alarm Name
Possible Cause Confirmation Correction Reference

 Loading...
Loading...







