No.
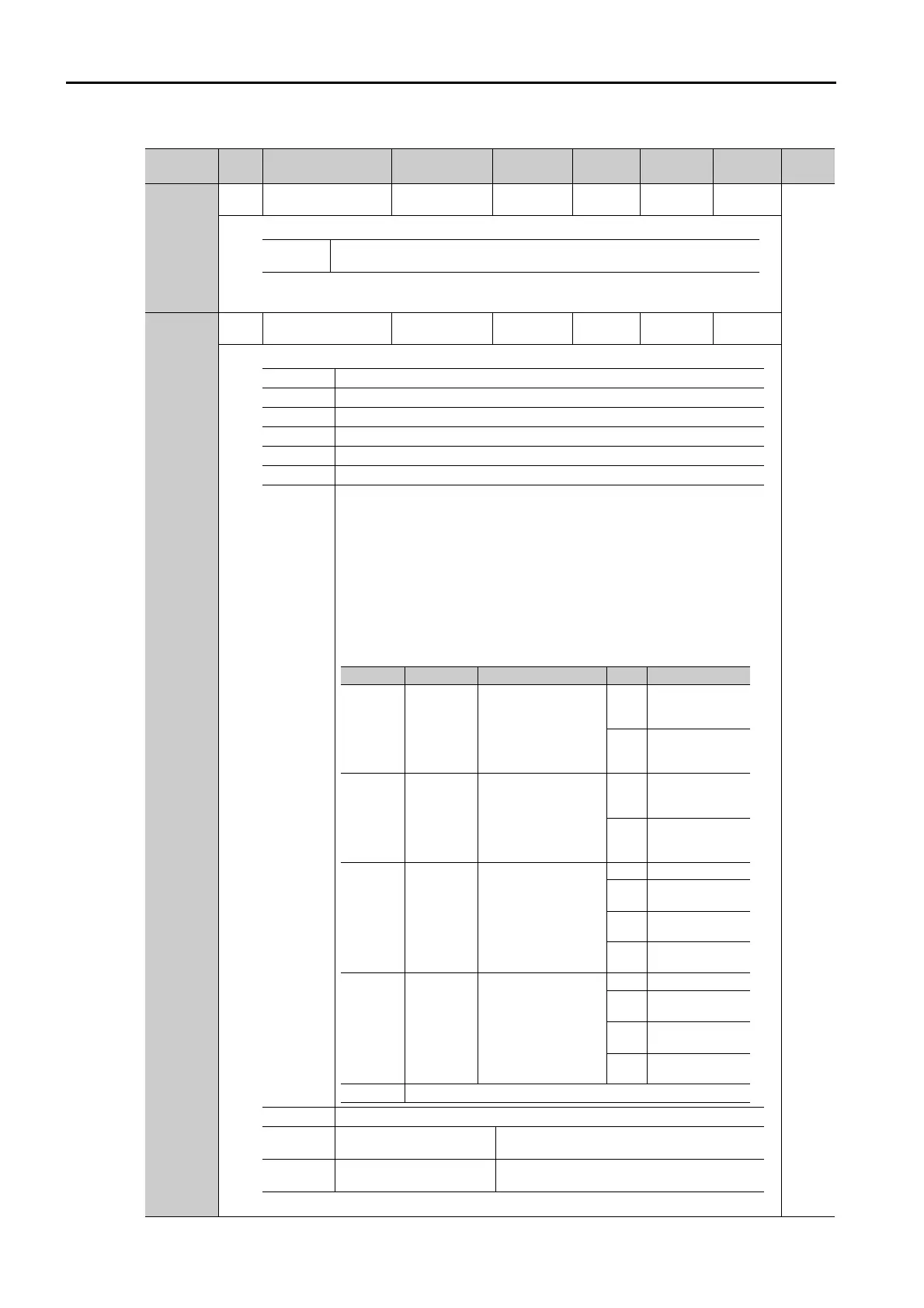
0000h TPOS (target position in reference coordinate system)
0001h IPOS (reference position in reference coordinate system)
0002h POS_OFFSET (offset set in POS_SET (Set Coordinate System) command)
0003h TSPD (target speed)
0004h SPD_LIM (speed limit)
0005h TRQ_LIM (torque limit)
0006h
SV_STAT (servo actual operating status)
Monitor Description
Byte 1: Current communications phase
00h: Phase 0
01h: Phase 1
02h: Phase 2
03h: Phase 3
Byte 2: Current control mode
00h: Position control mode
01h: Speed control mode
02h: Torque control mode
Byte 3: Reserved
Byte 4: Expansion signal monitor
0007h Reserved.
0008h INIT_PGPOS (Low)
Lower 32 bits of initial encoder position con-
verted to 64-bit position reference data
0009h INIT_PGPOS (High)
Upper 32 bits of initial encoder position con-
verted to 64-bit position reference data

 Loading...
Loading...







