Chapter 1 - Introduction
16 Adept Viper s650/s850 Robot with MB-60R User’s Guide, Rev D
1.7 Installation Overview
The system installation process is summarized in the following table. Refer also to the
system cable diagram in Figure 4-1 on page 51.
NOTE: For dual-robot installations, see the Adept Viper Dual Robot
Configuration Procedure, which is available in the Adept Document
Library.
1.8 Manufacturer’s Declaration
The Manufacturer's Declaration of Incorporation and Conformity for Adept robot systems
can be found at the Adept website, under the Support section. The URL for the folder is:
ftp://ftp1.adept.com/Download-Library/Manufacturer-Declarations/
Each Manufacturer's Declaration is supplied in PDF format and stored on the website in a
ZIP archive. To access the PDF document:
1. Click on the appropriate .zip file. You are prompted to Open or Save the file.
2. Click Open to open the file and display the archive contents.
3. Double-click on a .pdf file to open it.
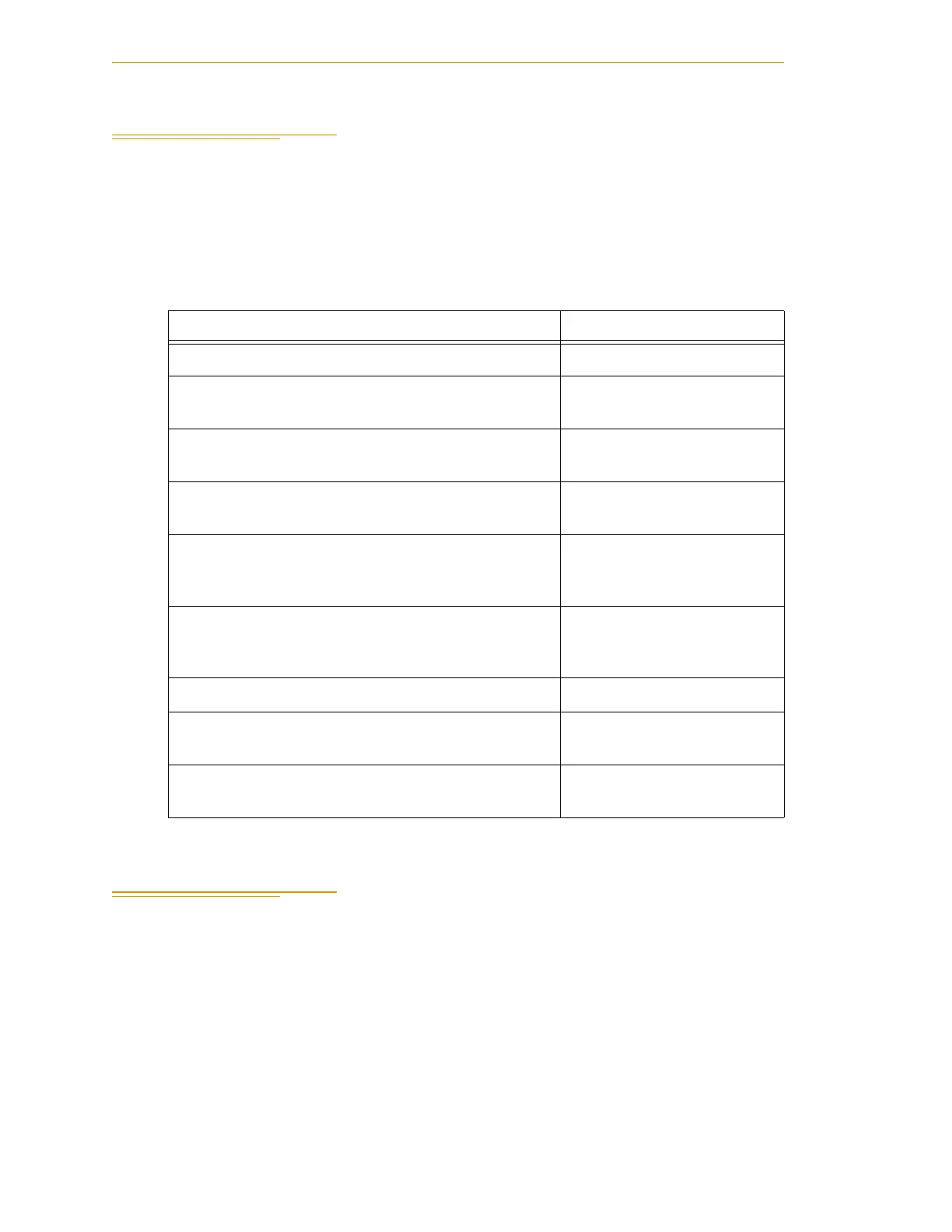
Table 1-1. Installation Overview
Task to be Performed Reference Location
1. Mount the robot on a flat, secure mounting surface. See Section on page 25.
2. Install the SmartController, Front Panel, and Adept
ACE software.
See Section 4.3 on page 52.
3. Install the IEEE 1394 and XSYS cables between
the MB-60R and SmartController.
See Section 4.6 on page 53.
4. Install the Arm Power/Signal cable between the
MB-60R and the robot.
See Section 4.7 on page 54.
5. Create a 24 VDC cable and connect it between the
MB-60R and the user-supplied 24 VDC power
supply.
See Section 4.8 on page 54.
6. Create a 200 - 240 VAC cable and connect it
between the MB-60R and the facility AC power
source.
See Section 4.9 on page 57.
7. Install user-supplied safety barriers in the workcell. See Section 4.11 on page 62.
8. Learn about connecting digital I/O through the XIO
connector on the MB-60R.
See Section 3.5 on page 42.
9. Read Chapter 6 to learn about system start-up and
testing operation.
See Chapter 5.