6-28
PPC Manual Revision 1
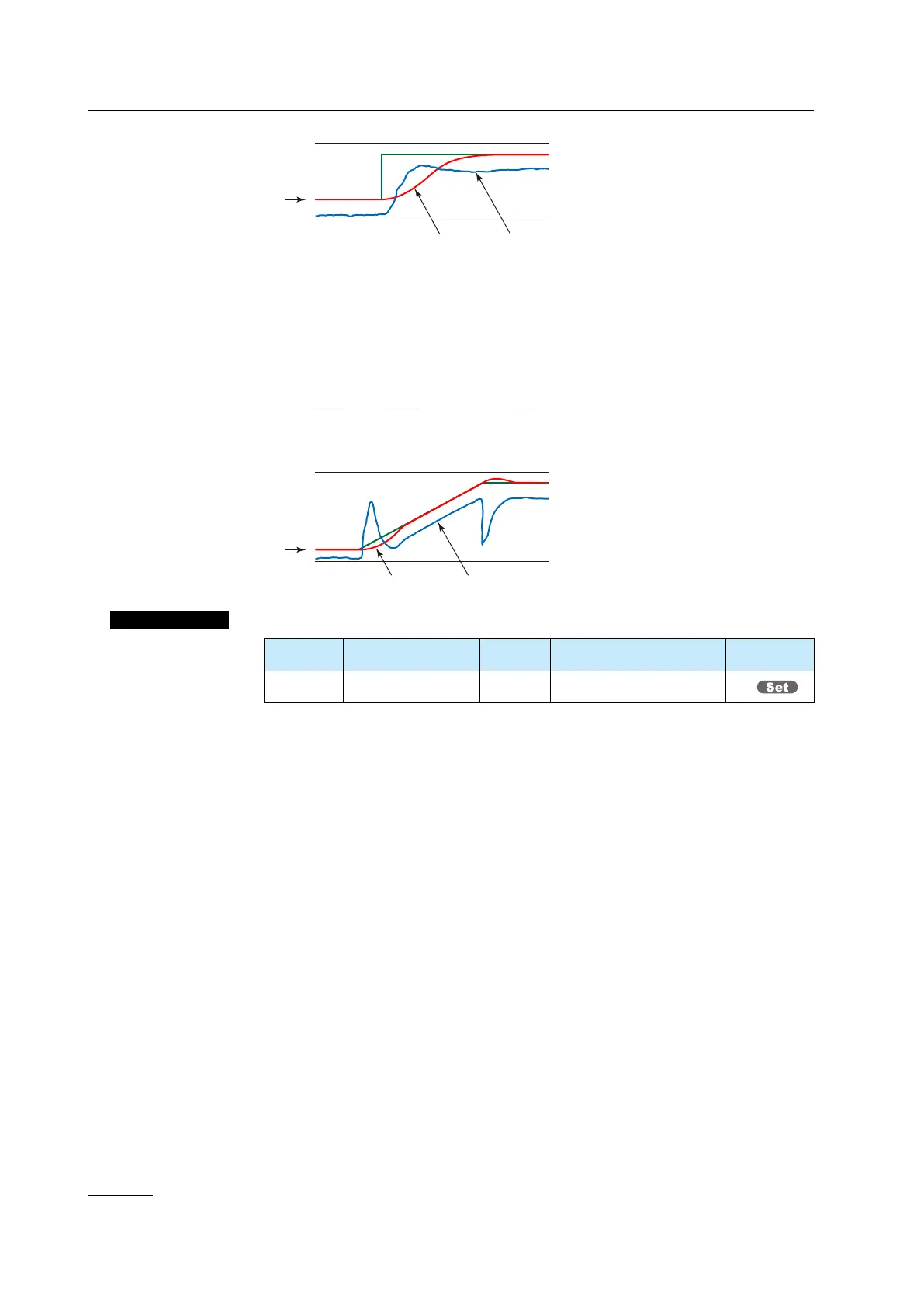
Deviation Derivative Type PID
e e
P
+ +dt Td e
=
100
Ti
1
dt
d
∫
• •
Setting Details
Parameter
symbol
Name
Display
level
Setting range Menu symbol
ALG
Chapter 6: Control Mode Settings

 Loading...
Loading...

