7. Service Procedures (Undefined variable: MyVariables.ProductName)
Troubleshooting Part Number: PF40-DI-00010 Rev. A
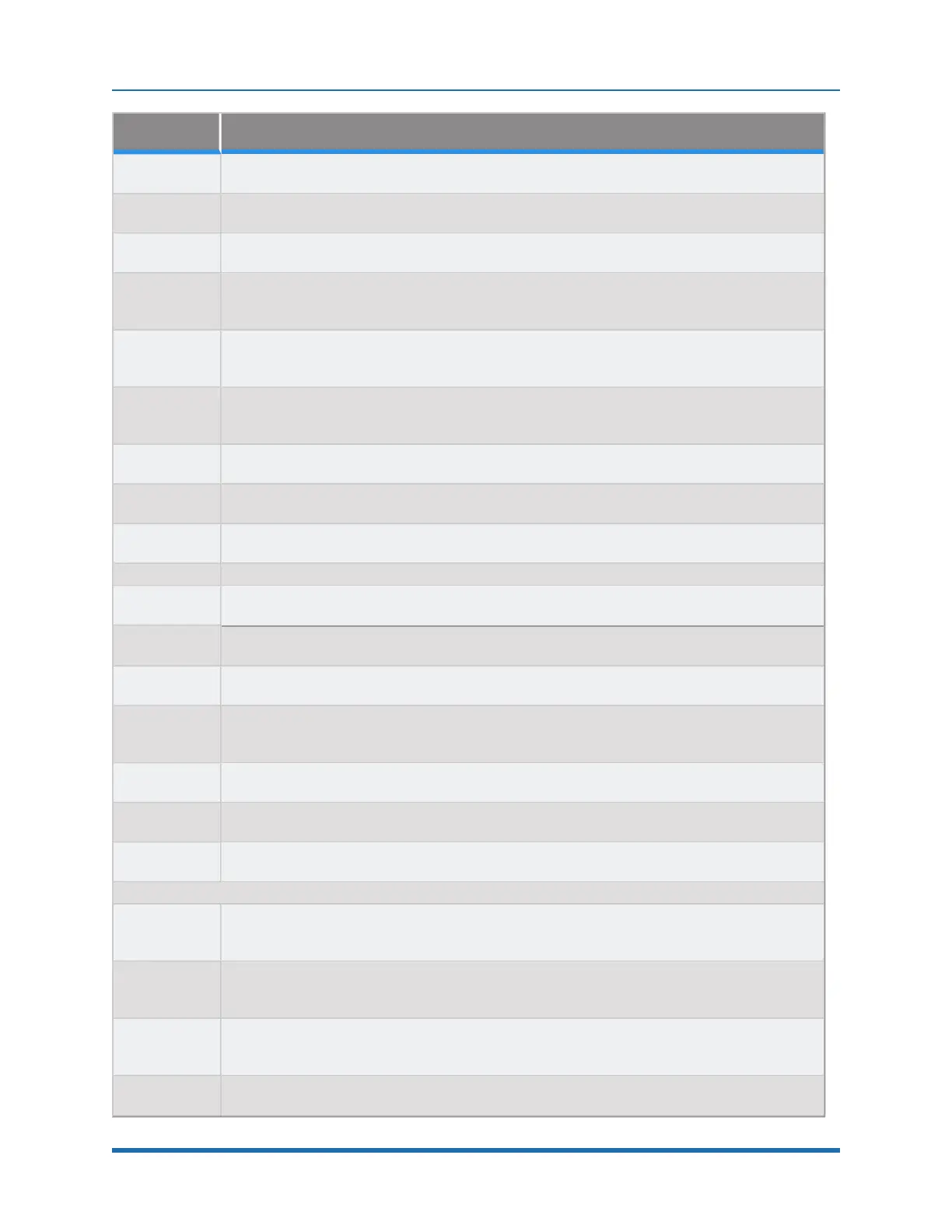
Symptom Recommended Action
“Encoder
Battery Low”
Replace absolute encoder battery in base of robot
“Encoder
Battery Down”
If encoder cable has been disconnected, recalibrate robot. If battery voltage has dropped below
2.5V replace encoder battery and recalibrate robot.
“Encoder
Operation Error”
Joint rotated too quickly with power off. See Procedure below.
“Encoder Data,
Accel/decel
Limit Error”
Check that the FPGA code is dated Jan 25, 2012 or later. Upgrade FPGA if necessary. Encoder
cable may be damaged and encoder is getting intermittent communication, causing apparent
jumps in position. Check encoder connectors on flat ribbon cable. Replace cable. Replace motor.
“Encoder
Communication
Error”
Check that the FPGA code is dated Jan 25, 2012 or later. Check encoder connectors on flat ribbon
cable. Replace encoder cable or motor/encoder.
"Encoder
quadrature
error"
Replace slip ring. Replace motor/encoder (only Gripper motor ).
"Missing zero
index"
See "Encoder quadrature error"
“Motor duty
cycle exceeded”
Reduce speed or acceleration of robot. Check for instability.
“Amplifier under
voltage”
Motor power supply has reached current limit and shutdown. Slow down robot. Check Energy
Dump PCA. Replace 48V supply.
“Amplifier Fault” Check harness and motor for shorts.
“Amplifier Over
Voltage”
Replace energy dump board. Check harness for shorts.
“Soft Envelope
Error”
Make sure robot not pressing against surface. If this occurs on the gripper repeatedly, replace slip
ring.
“Hard Envelope
Error”
Typically means robot has crashed into something.
Pneumatic
Gripper Sensor
not working
Check continuity of cable through wrist. Check green lights on sensor to see if sensor is triggering.
“Time Out
Nulling Error”
Check that joint is free to move with brake off. Check that joint is not vibrating or unstable. If
unstable check belt tension. If Gripper, replace slip ring after checking that brake releases.
“Joint Out of
Range”
The joint actual or commanded position may be beyond the software limit stop. Move joint back
into range while monitoring virtual pendant or check program for commanded position.
“PAC Files
Corrupted”
See recovering from corrupted PAC Files
Physical or audible problem
Brown streaks
on linear
bearing
Clean with alcohol and add grease to bearing blocks. This should not be required sooner than
20,000 hours of run time. Grease is Alvania Grease EP2 from Shell.
Mechanical
noise from any
joint
Check joint bearings for failure. Re-tension belt.
Loud buzzing or
vibration from
any joint
Re-tension timing belts. If timing belt will not hold tension, replace.
Squeaking from
Z belt
Apply thick grease to front and rear edges of belt, (Mobile 222 XP). Belt can get stiff over time and
squeak against pulley flanges.
93
Copyright © 2023, Brooks Automation