Brooks Automation 7. Service Procedures
Part Number: PF40-DI-00010 Rev. A Encoder Operation Error
Encoder Operation Error
The PF400 robot is equipped with absolute encoders that keep track of the robot position even
when AC power to the robot is disconnected. There is a battery in the base of the robot that provides
standby power to the encoders. In standby mode, there is a limit on how quickly the motor can turn
and still have the standby counter operate properly. The limits are 6,000 rpm and 4000 rad/s
2
. Even
at 100% speeds the robot joints normally do not move faster than about 2,000 rpm and 1300 rad/s
2
.
However, if the robot is shocked during shipping, it is possible the standby operation acceleration
error limit may be exceeded. This can generate an encoder operation error that will prevent the
robot from homing after power up.
This error will be displayed in the Operator Window of the Web Interface as “Encoder Operation
Error” Robot 1: <axis number>.
Assuming the robot has not been damaged by the shipping process, this error can be reset by the
following procedure:
Step Action
1.
Access the Web Operator Interface to the robot with either “Maintenance” or “Administrator”
privileges.
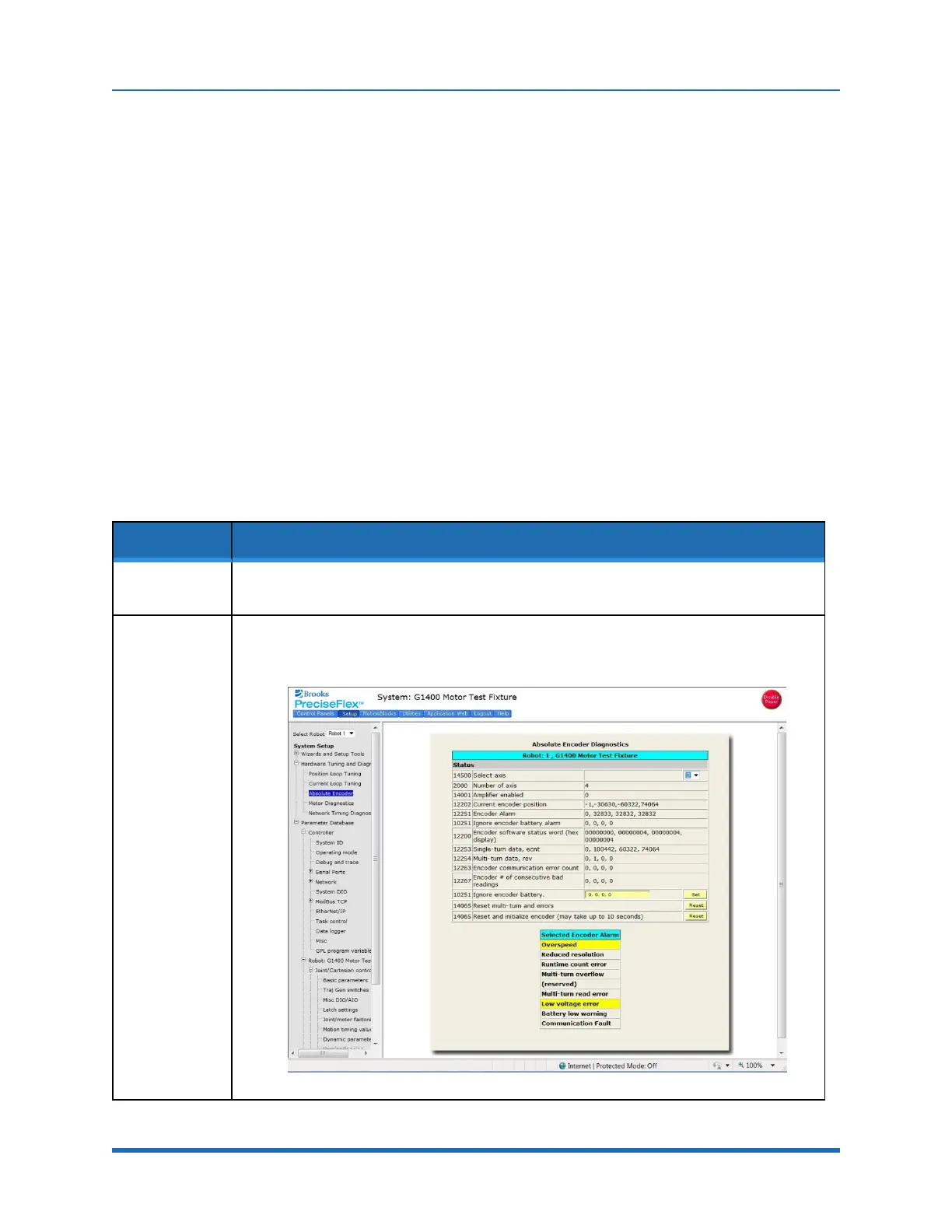
2.
In the Setup menu, select System Setup > Hardware Tuning and Diagnostics > Absolute
Encoder.
>
Copyright © 2023, Brooks Automation
94