Brooks Automation 6. Software Reference
Part Number: PF40-DI-00010 Rev. A Optional Pneumatic or Vacuum Gripper
Optional Pneumatic or Vacuum Gripper
It is possible to order robots with or without servo grippers. However, when changing from a servo
gripper to a pneumatic or vacuum gripper, the PAC files in the robot must be changed to remove the
servo gripper control configuration. Contact support_preciseflex@brooksautomation.com for help.
Then, the cabling must be changed per below to support the IO signals to drive pneumatic or
vacuum solenoids. See Figure 6-4 through Figure 6-8.
In the Revision C of the PF400, the motor interface board in the outer link can be connected by
means of a flat ribbon cable to the controller digital inputs and digital outputs, providing support for
both pneumatic and vacuum grippers where desired.
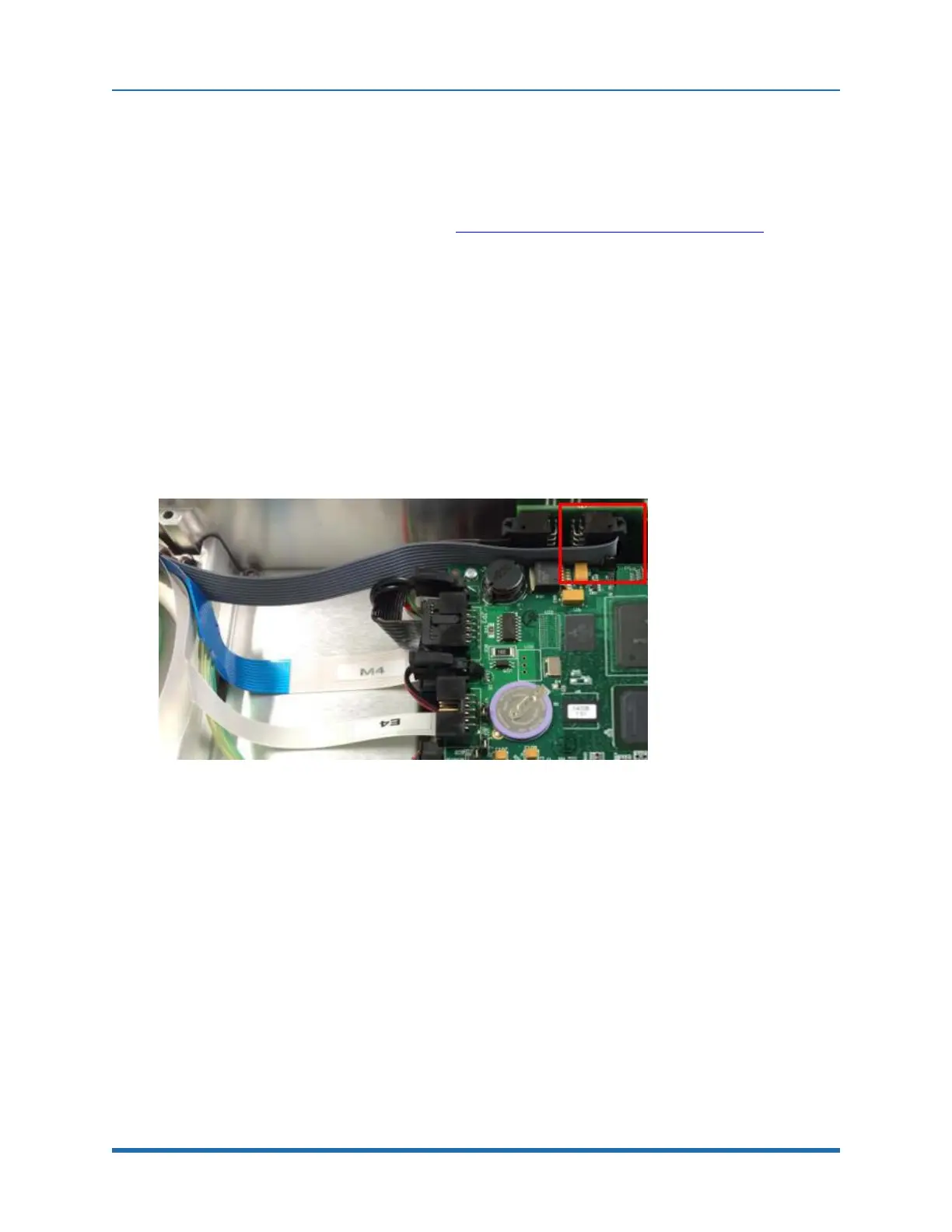
When the inner link end of this cable is plugged into the IO connector on the interface board on the
side of the inner link, the innermost IDC connector on the end of cable in the outer link should be
plugged into the J4 motor interface board. Conversely, when the inner link connector is plugged into
the RS-485 connector on the robot controller in the inner link, the outermost IDC connector should
be plugged into the GSB servo gripper control board in the outer link.
Figure 6-4: Inner Link Cable Position for IOSignals
Copyright © 2023, Brooks Automation
88