6. Software Reference (Undefined variable: MyVariables.ProductName)
Optional Pneumatic or Vacuum Grip-
per
Part Number: PF40-DI-00010 Rev. A
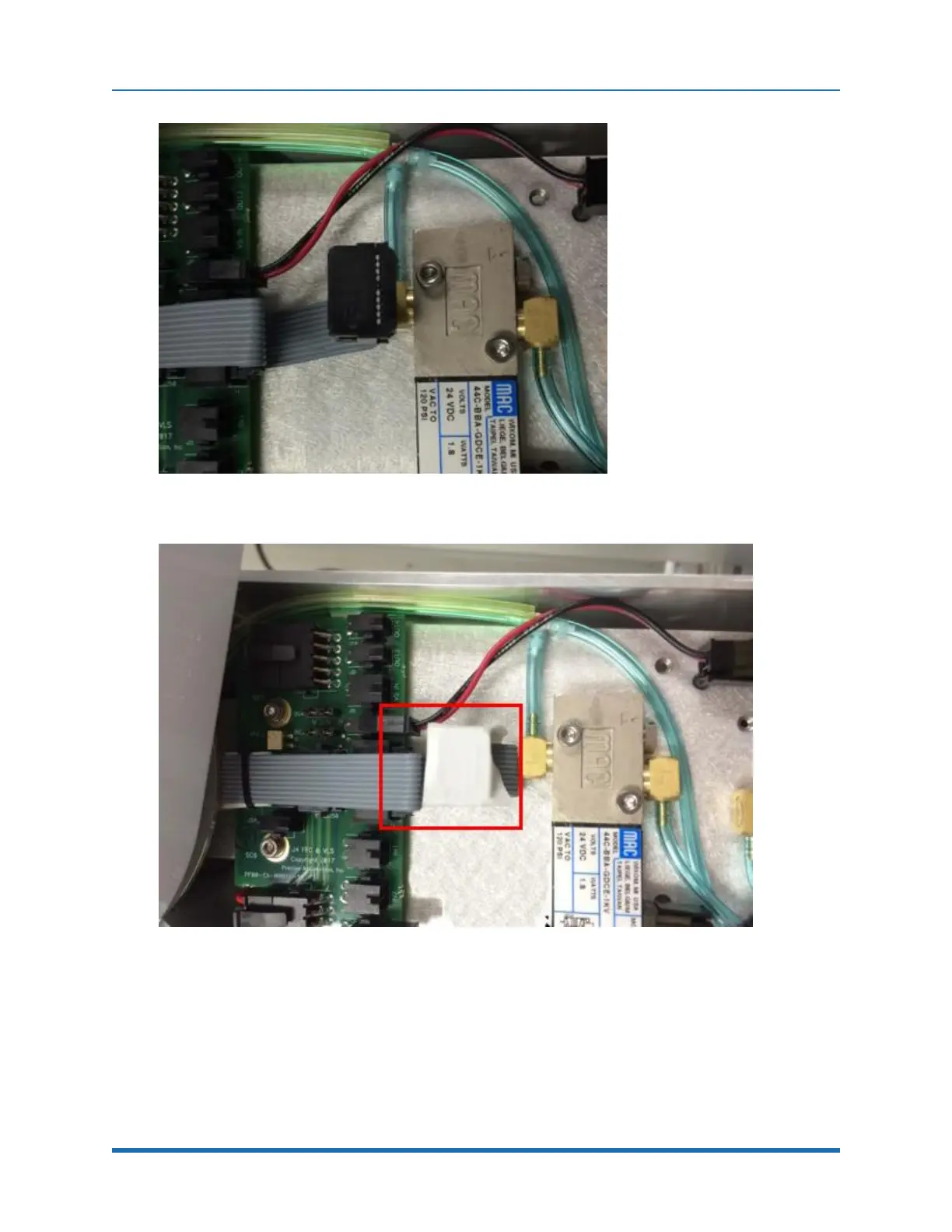
Figure 6-5: Ribbon Cable with Dual Connectors in Outer Link
Figure 6-6: Plug the Inside Connector into the J4 Motor Interface Board to Connect IO
Signals. Tape Over the End of the Outside Connector.
While some grippers for OEM customers differ slightly from the following, in general for the
pneumatic gripper controller digital output 1 will open the gripper. Controller digital input 1 goes high
when the gripper is open and input 2 goes high when the gripper is closed. (See the section on
controller digital input and output signals for the software assignments of these signals.)
89
Copyright © 2023, Brooks Automation