2. Introduction to the Hardware (Undefined variable: MyVariables.ProductName)
System Components Part Number: PF40-DI-00010 Rev. A
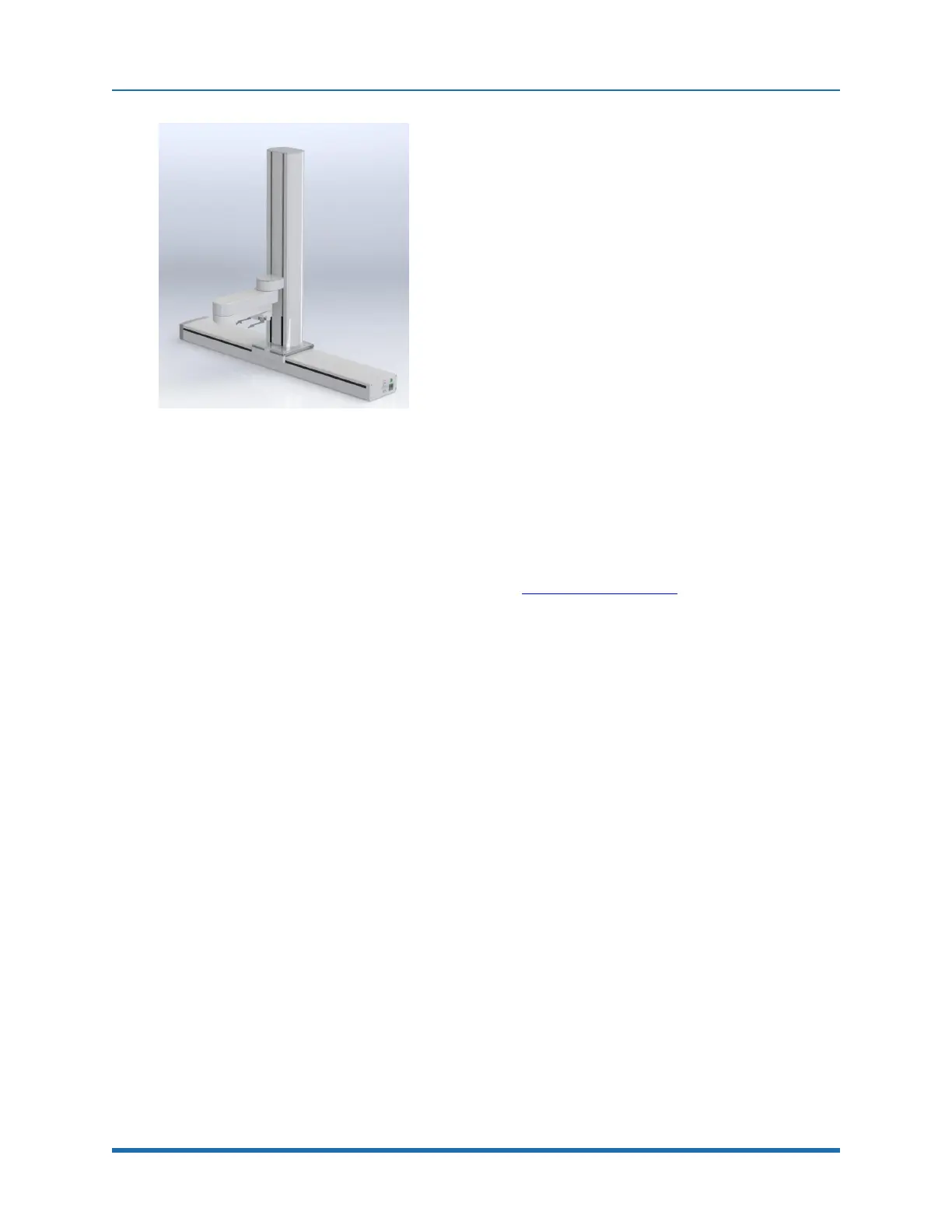
Figure 2-3: 750 mm Vertical Travel PF400 on a 1000 mm Linear Axis Module
Mounting of Robot and Linear Axis Module
The Robot Base Plate contains a mounting hole pattern for (4) M6 screws along with reference
surfaces for locating the robot on a table or work cell surface. The Linear Axis Module contains
mounting patterns for both M6 and ¼-20 screws. See Installation Information for details.
Optional Gripper
The robot may be ordered with an optional Gripper. The Gripper may be either electric, pneumatic,
or vacuum. Several options are available.
Guidance 1400B Controller
The Guidance 1400B Controller is a 4-axis general purpose motion controller that contains four
motor drives and four encoder inputs. It must be attached to a heat sink. The heat sink is provided
by the inner link housing. The controller includes local digital IO. It also supports RS-232 and RS-
485 serial communication and an optional PreciseFlexRemote IO module. It contains two Ethernet
ports. The controller and power supplies are shown in the system diagram in Figure 2-4.
17
Copyright © 2023, Brooks Automation