Appendices (Undefined variable: MyVariables.ProductName)
Appendix A: Product Specifications Part Number: PF40-DI-00010 Rev. A
Appendices
Appendix A: Product Specifications
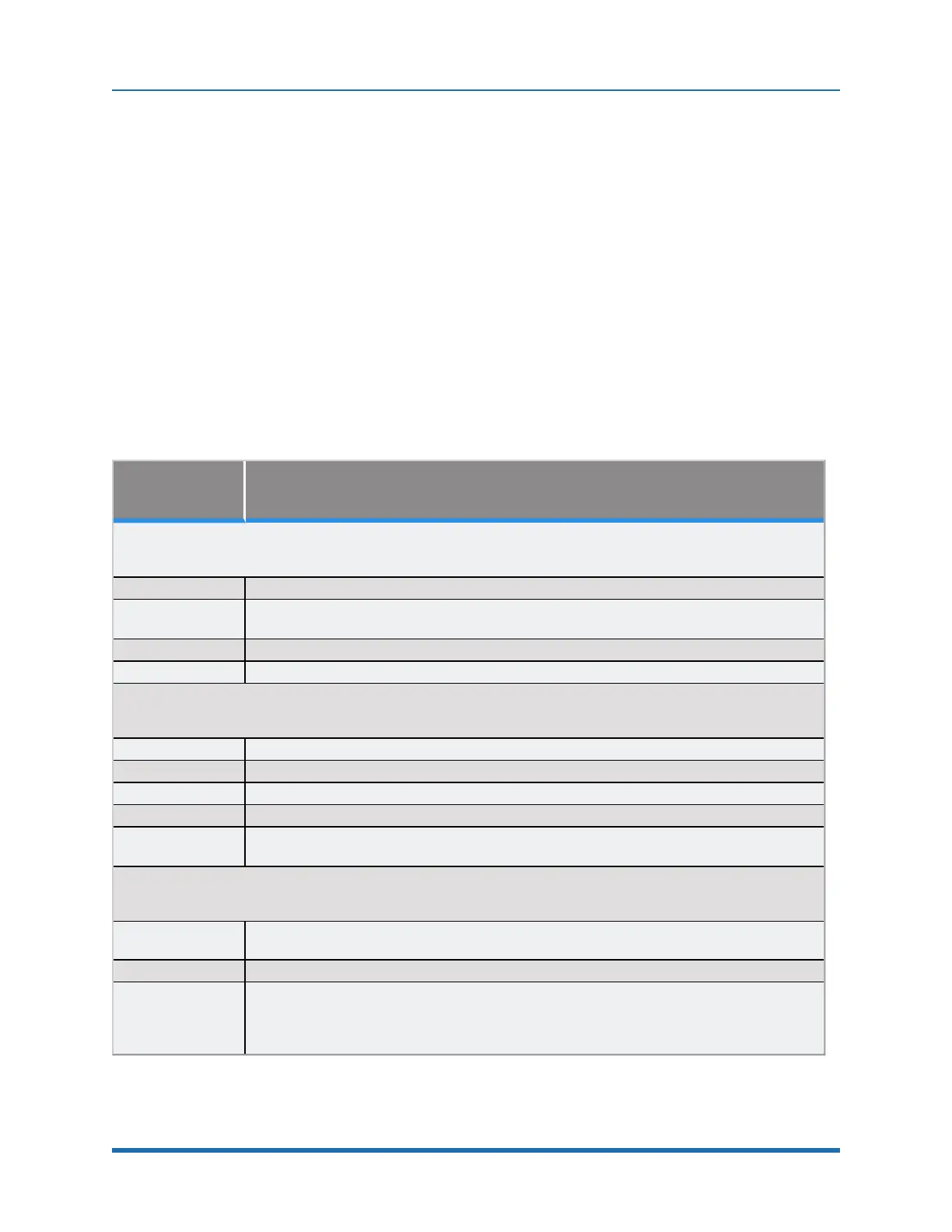
General
Specification
Range
PERFORMANCE
Payload 0.5 kg with Servo Gripper
Typical Speed at
TCP
500 mm/sec
Max Acceleration 2000 mm/sec2
Repeatability ±0.090 mm
RANGE OF MOTION
Joint 1 (Z-axis) 400, 750, 1160 mm
Joint 2 ±93°
Joint 3 ±168°
Joint 4 ±960° with servo gripper
Horizontal Reach
579 mm, standard reach
734 mm, extended reach
COMMUNICATIONS
General
100 Mb Ethernet, TCP/IP
EtherNet/IP
Operator Interface Web-based operator interface
Digital I/O
12 inputs, 8 outputs at base of robot
optically isolated, 24 V @ 100 ma
2 in, 4 our for end-of-arm-tooling
Remote I/O available
Table 8-1: PreciseFlex 400 Specifications
157
Copyright © 2023, Brooks Automation