7. Service Procedures (Undefined variable: MyVariables.ProductName)
Calibrating the Robot: Setting the
Encoder Zero Positions
Part Number: PF40-DI-00010 Rev. A
Step Action
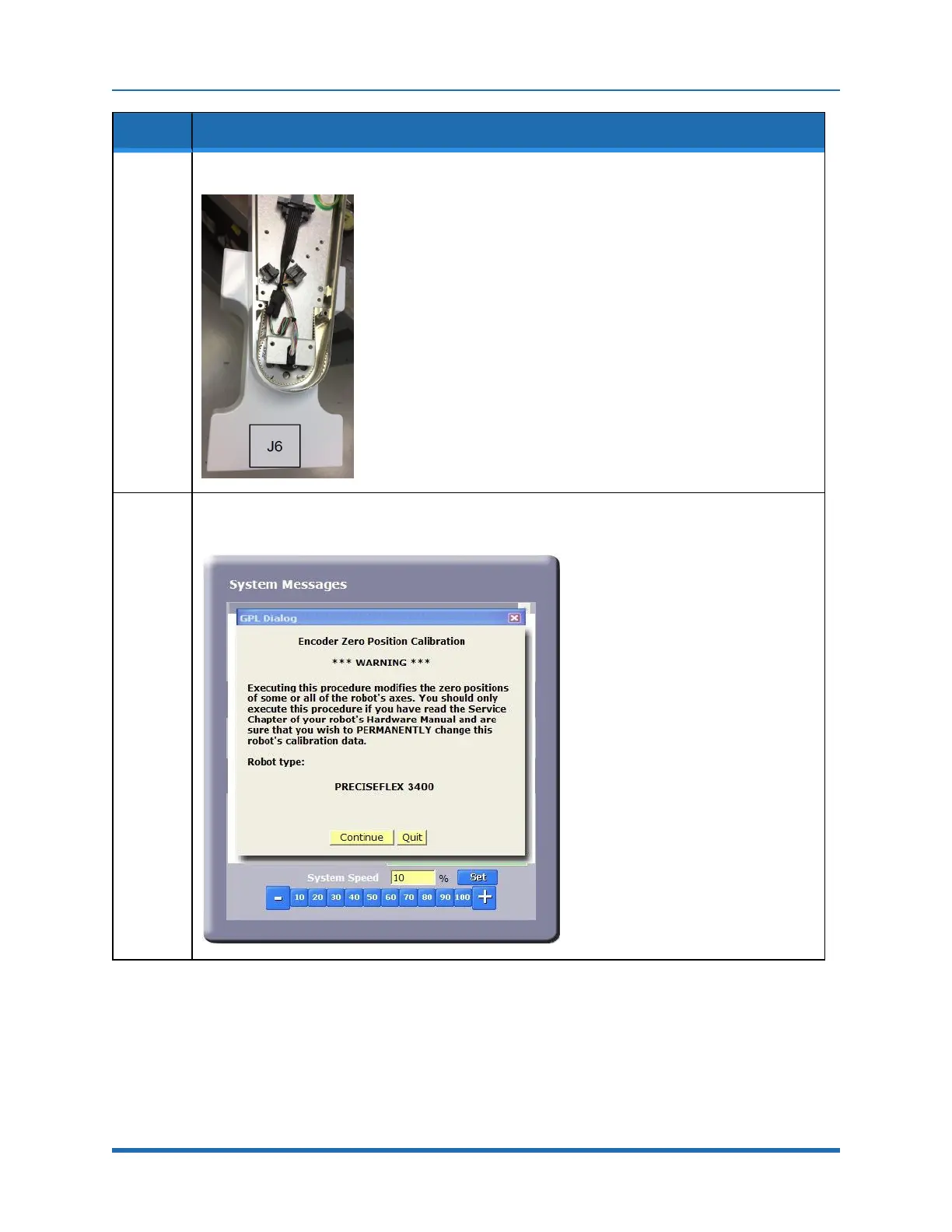
11.
For the Dual Gripper, J6 will be in the outwards orientation in the CALPP position.
12.
With the CALPP application loaded, select Start Application and then click Perform Operation.
The application should start and prompt the user to confirm the correct robot position for calibration.
99
Copyright © 2023, Brooks Automation