7. Service Procedures (Undefined variable: MyVariables.ProductName)
Replacing the Servo Gripper Controller Part Number: PF40-DI-00010 Rev. A
Step Action
4.
Replace the Gripper Controller and re-attach the harness.
5.
Replace the Outer Link Cover.
6.
It is not necessary to recalibrate the robot after replacing the Gripper Controller. Starting January of
2013 gripper controllers are a new revision (GSB3), which replaces the address DIP switch with
jumpers. To make the software in the GSB3 work in a compatible mode with the standard PAC files,
Jumper J11 must be removed.
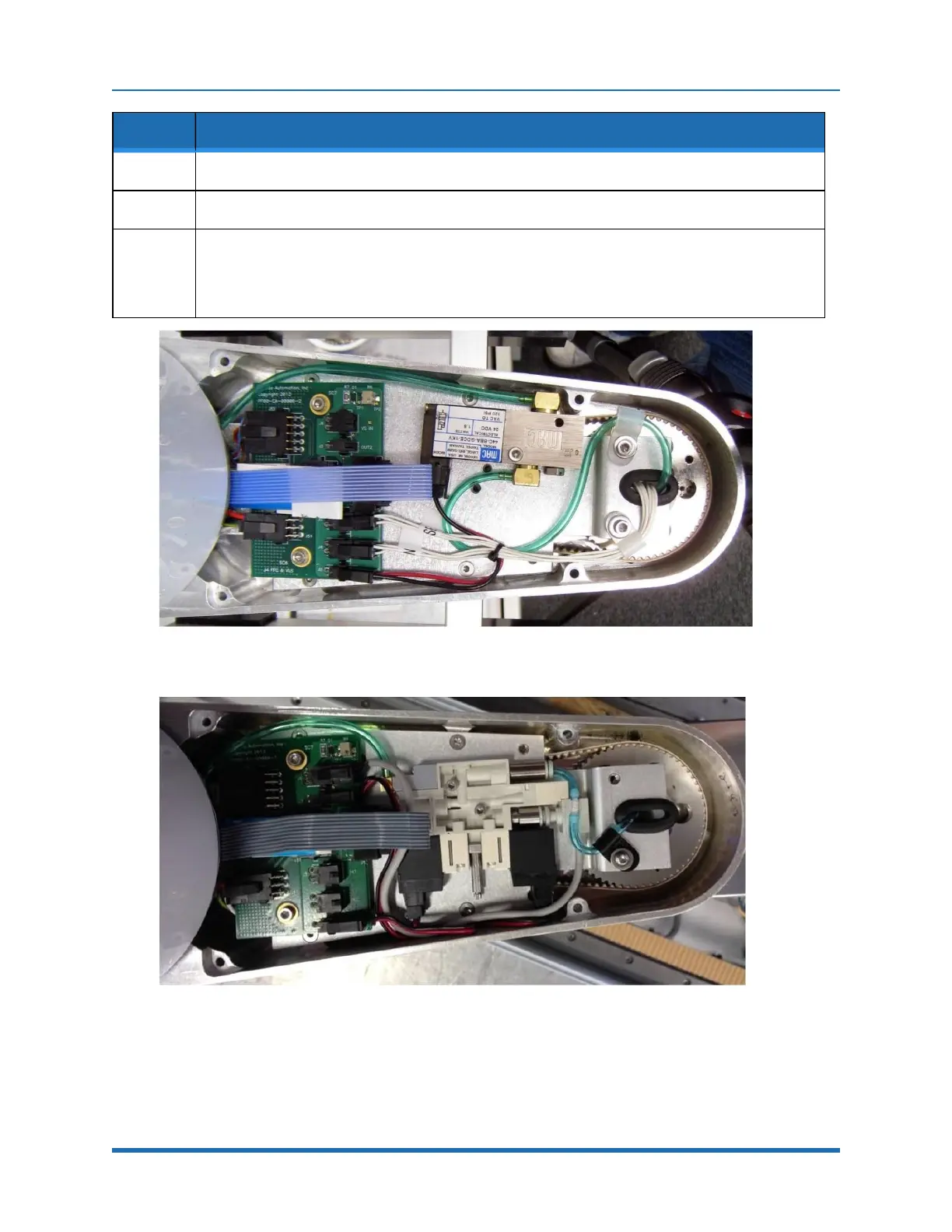
Figure 7-4: Wiring for Pneumatic Gripper
Figure 7-5: Wiring for Vacuum Gripper
117
Copyright © 2023, Brooks Automation