Chapter 3: Installation and Testing
3.10 Throttle Configuration
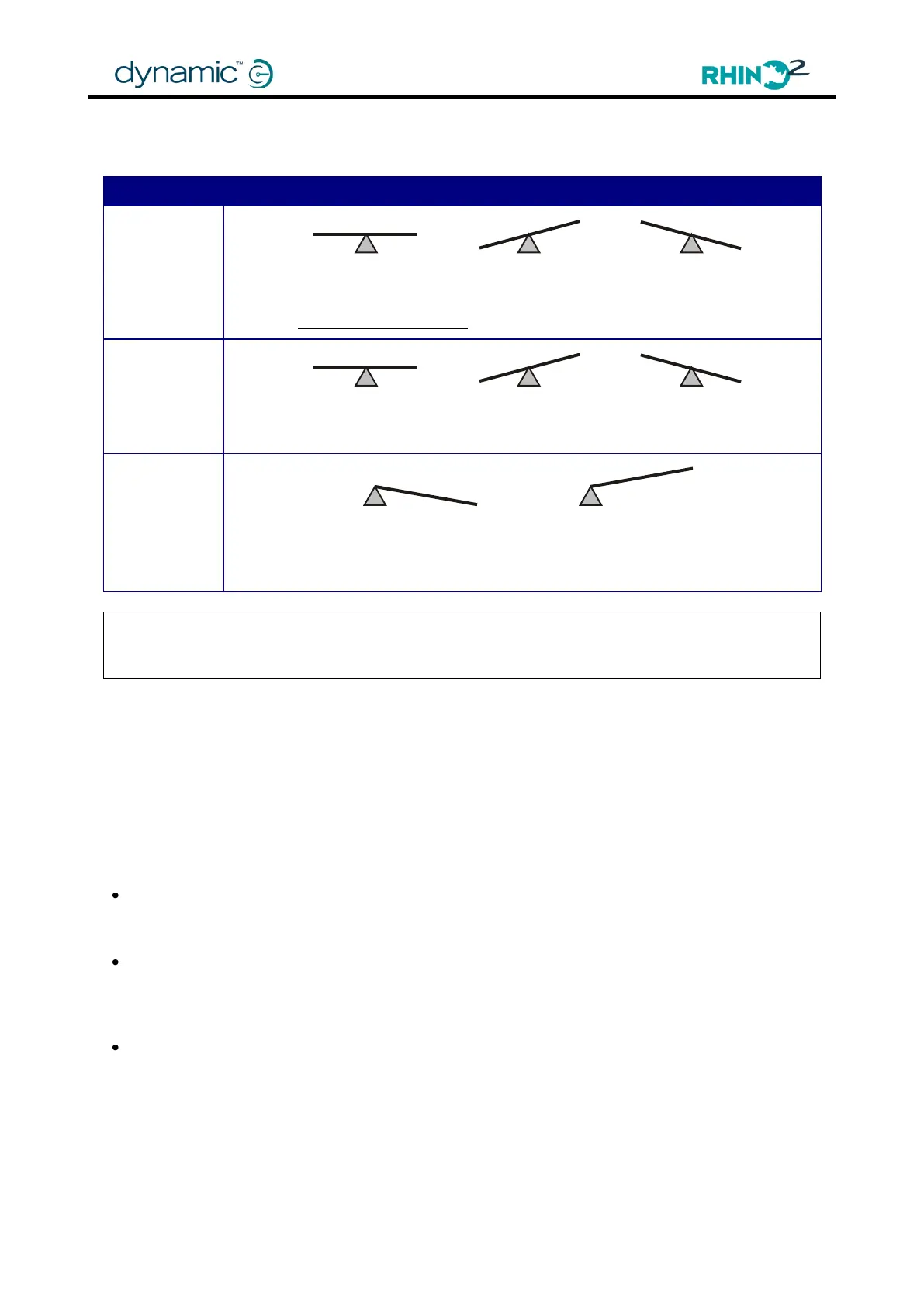
Select the correct throttle type with the Throttle Type parameter (4.4.2.1):
Neutral Forward Reverse
To swap the forward and reverse directions (for left-handed use),
set the Swap Throttle Direction parameter (4.4.1.3) to 'Yes'.
Neutral Forward* Forward*
The scooter moves in the same direction for both sides of the throttle.
Neutral Forward*
Neutral is not halfway but at the start of the pot.
The full speed position in a single direction is at the end of the pot.
* The direction is dependent on the position of a Forward/Reverse switch. Connect this switch
to one of the Multi-function Inputs (3.11.1), and set the corresponding Pin [X] Function
parameter (see 4.4.9) to 'Reverse Drive'.
To have more throttle control at low speeds, increase the Throttle Response parameter
(4.4.2.5).
3.10.1 ISO7176-14 2008 requirements
The ISO7176-14 standard requires that the scooter does not start to drive when the throttle
circuit is faulty or not calibrated correctly. To comply with this standard, Dynamic Controls‟
RHINO2 controller provides 'Dual Decode' functionality.
The RHINO2 supports 3 throttle configurations:
Single throttle wiper 3.10.2.
Compatible with previous Rhino and R-Series products, but does not comply with the new
ISO standard without additional hardware that checks the throttle signal.
Single throttle wiper with separate Neutral Detect switch input 3.10.3.
The Neutral Detect switch indicates whether or not the throttle is in the physical neutral
position. If the throttle signal does not match the Neutral Detect signal, the controller
generates a fault and does not drive.
A throttle with 2 linear wiper signals that are each other's opposite 3.10.4.
If the sum of both signals is not constant, the controller generates a fault and does not drive.