Chapter 4: Programming the Rhino2
Set Load Compensation to the resistance of the motor that is installed on the scooter.
Drives like it is going
through thick mud
Slows down when it goes
up a sidewalk edge or
up a ramp
Slows down with heavier
users
Rolls back significantly
after stopping on a slope
Drives smoothly
Keeps the speed
reasonably constant.
Only slightly slows
down on a slope
Does not roll back
after stopping on a
slope
Drives very rough
Hard to control,
vibrates or surges
May creep forward
after stopping on a
slope
Motor becomes hotter
than normal very easily,
decreased motor life
If the scooter gives poor performance on carpet or at low speeds, the most probable cause
is a Load Compensation value that is set too low.
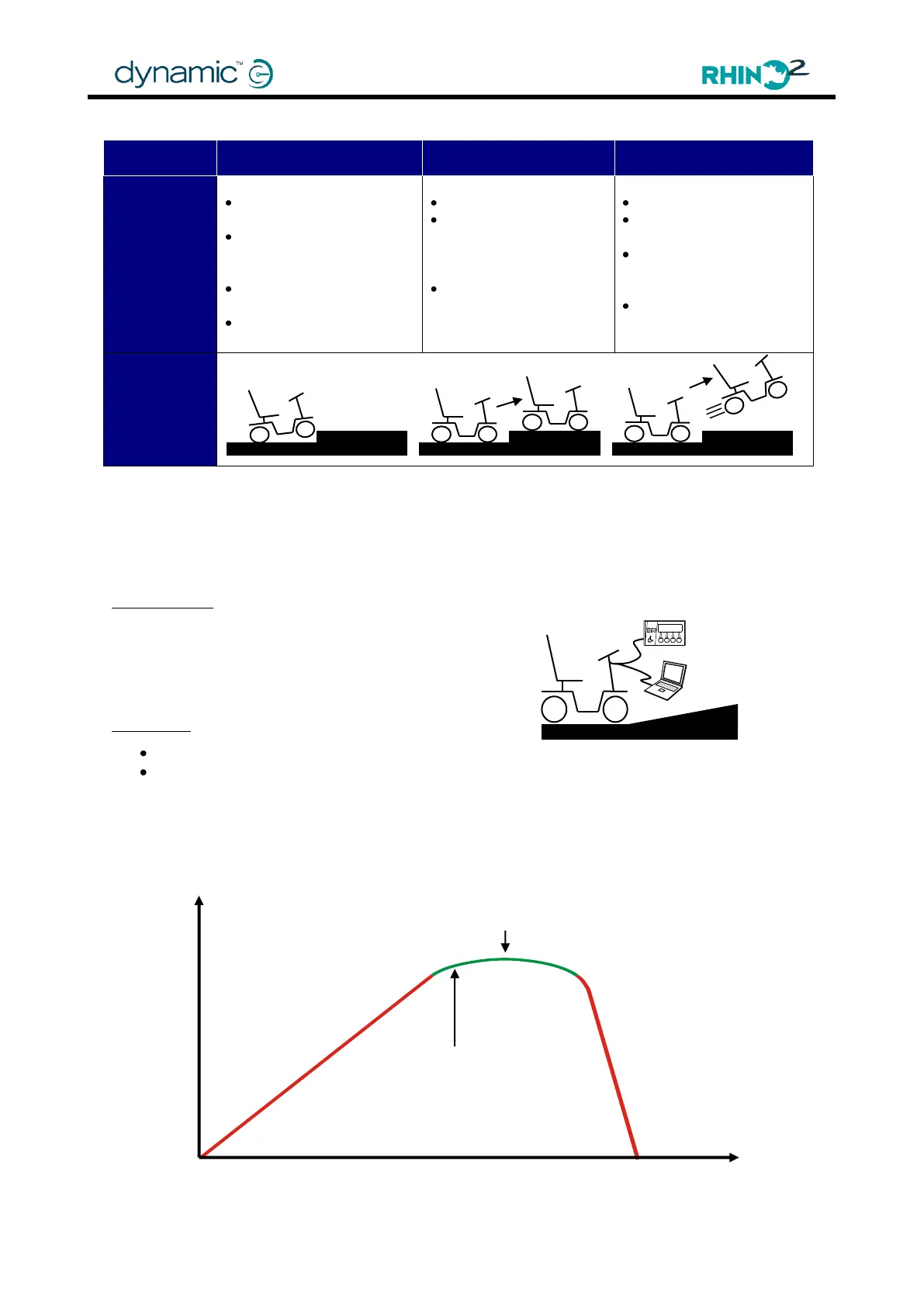
Determining the correct motor resistance by looking at the scooter behaviour
Tools needed
1. A scooter with a RHINO2 controller fitted
2. A Hand Held Programmer (HHP) or
a laptop with the Wizard Programmer
3. A slope that you can drive up to
Procedure
Set Load Compensation to 20.
Drive the scooter onto a slope and increase the Load Compensation value until the
scooter does not roll back after it has stopped on the slope.
To test if Load Compensation has the correct value, perform a series of scooter tests (drive on
a slope, up a sidewalk edge, and over thick carpet) and check if the scooter behaviour is
similar to the correct behaviour described above.
Optimum Load Compensation.
Scooter responsive AND smooth
Uncontrollable
Aim for this point: 20 % back
from the top of the hill