Chapter 9 Behavior Settings
9-8 ER1 User Guide
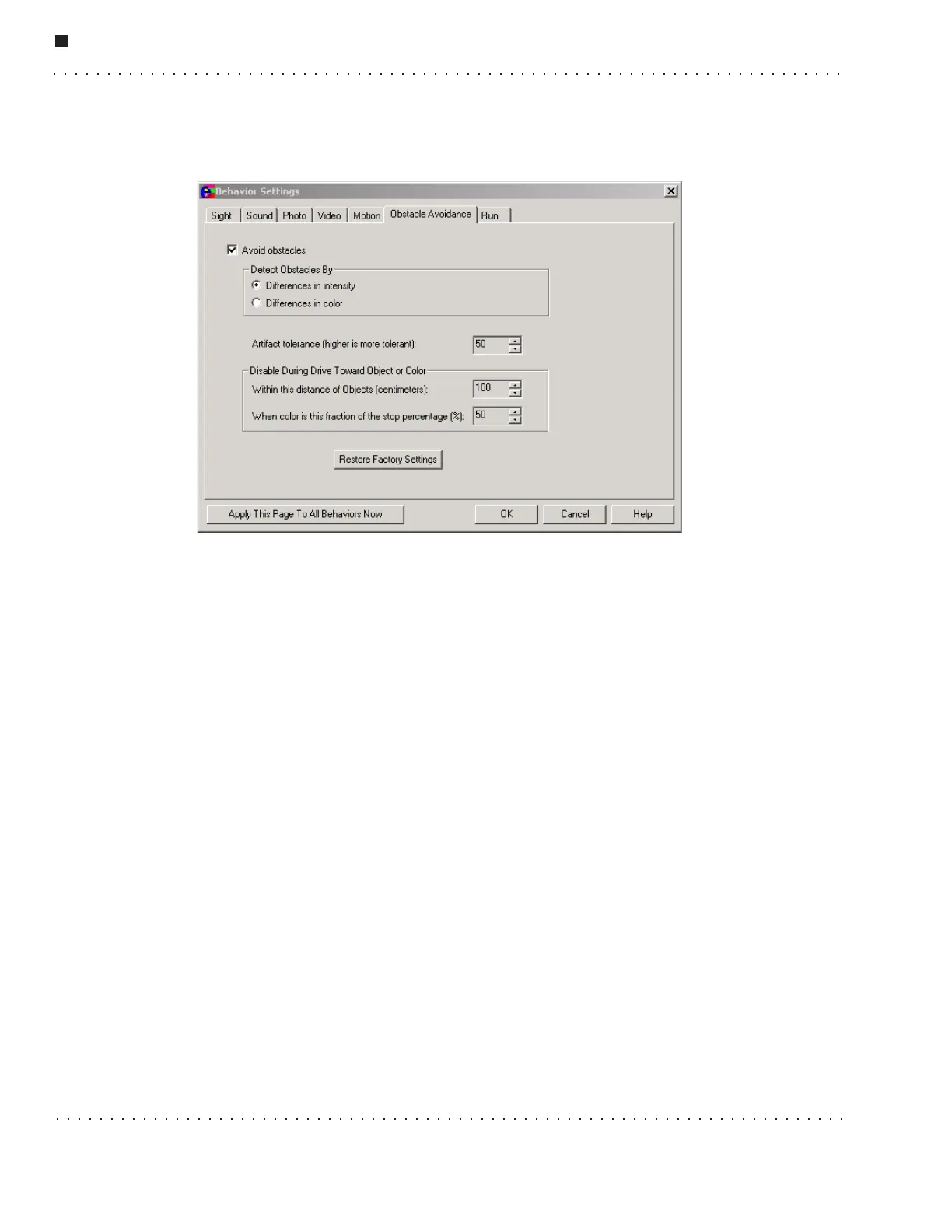
Obstacle Avoidance
These parameters are used to activate and adjust the ER1’s obstacle avoidance system.
• Avoid Obstacles - To activate the obstacle avoidance system, select this option.
This option is set to off by default.
• Detect Obstacles by - These parameters allow you to select a method for
detecting obstacles.
• Differences in intensity - This method detects obstacles by detecting
differences in light intensities.
• Difference in color - This method of obstacle avoidance uses differences in
color to detect obstacles.
• Artifact Tolerance - The higher this value is set, the less likely that differences
in colors and contrasts will be perceived as obstacles.
• Disable During Drive Toward Object or Color - These parameters specify
when to disengage the ER1’s motors when driving toward an object or color.
These parameters will prevent the robot from colliding with the intended target.
• Within this distance of objects - This value specifies the number of
centimeters from the target that the robot should stop. This value should
never be set to less than 4cm, as there is a good chance that the robot will
collide with the intended target.
• When color is this fraction of the stop percentage - This parameter
specifies that the robot should stop when the selected color takes up a
certain percentage of the screen.
When you have finished adjusting the parameters, click the Ok button. You may cancel at
any time by clicking on the Cancel button.