5. Parameter
5−50
Festo P.BE−CPX−CMAX−CONTROL−EN en 0908NH
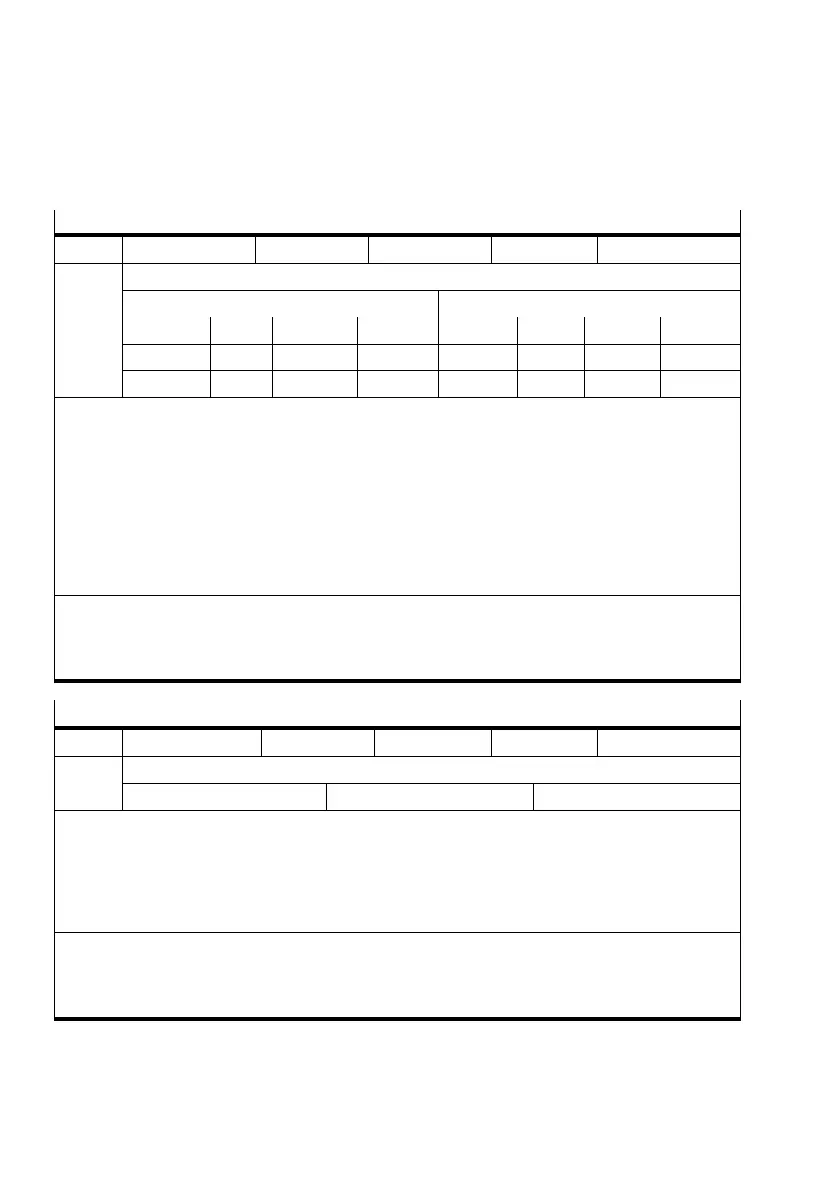
Record workpiece mass
PNU PNU: 410 Index: 1 ... 64 Max index: 64 Class: Array Data type: int32
Values Unit: Mass (index = 5)
Linear drive Semi−rotary drive
Dimension Default Minimum Maximum Dimension Default Minimum Maximum
SI 0.1 kg 0 0 20.000 1 kg cm
2
0 0 2.000
Imperial 1 lb 0 0 4.409 0.1 lb in
2
0 0 6.834
Current workpiece mass.
Deviations from the actual mass load worsen the positioning behaviour. From mass changes of ap
prox. 30%, the current mass should be specified. The total moving mass is the sum of workpiece
load without workpiece (PNU 1142) and workpiece mass.
For vertical installation, the correct workpiece mass is absolutely essential in order to calculate the
zero force of the force control. An error in the data can lead to a movement of the axis if the default
is 0 N.
Default values: For position control: RPC bit 5 Default value from parameter PNU 605
For force control: RPC bit 5 Default value from parameter PNU 605
o The parameter value cannot be changed.
o Writing permissible only in commissioning/parametrising mode with disabled controller.
ý This parameter can be written by FCT without higher−order controller.
o After writing, controller recalculation is carried out.
Record tolerance
PNU PNU: 411 Index: 1 ... 64 Max index: 64 Class: Array Data type: int32
Values Unit depends on control mode: Position, force (index = 1or 3)
Default: 0 Minimum: 1 Maximum: 1.000
Specification of the tolerance to be used with this record.
Control mode position (RCB1.COM1 = 0): Position tolerance in unit position (index 1)
Control mode position (RCB1.COM1 = 1): Force tolerance in unit force (index 3)
Default values: For position control: RPC bit 6 Default value from parameter PNU 606
For force control: RPC bit 7 Default value from parameter PNU 607
o The parameter value cannot be changed.
o Writing permissible only in commissioning/parametrising mode with disabled controller.
o This parameter can be written by FCT without higher−order controller.
o After writing, controller recalculation is carried out.

 Loading...
Loading...











