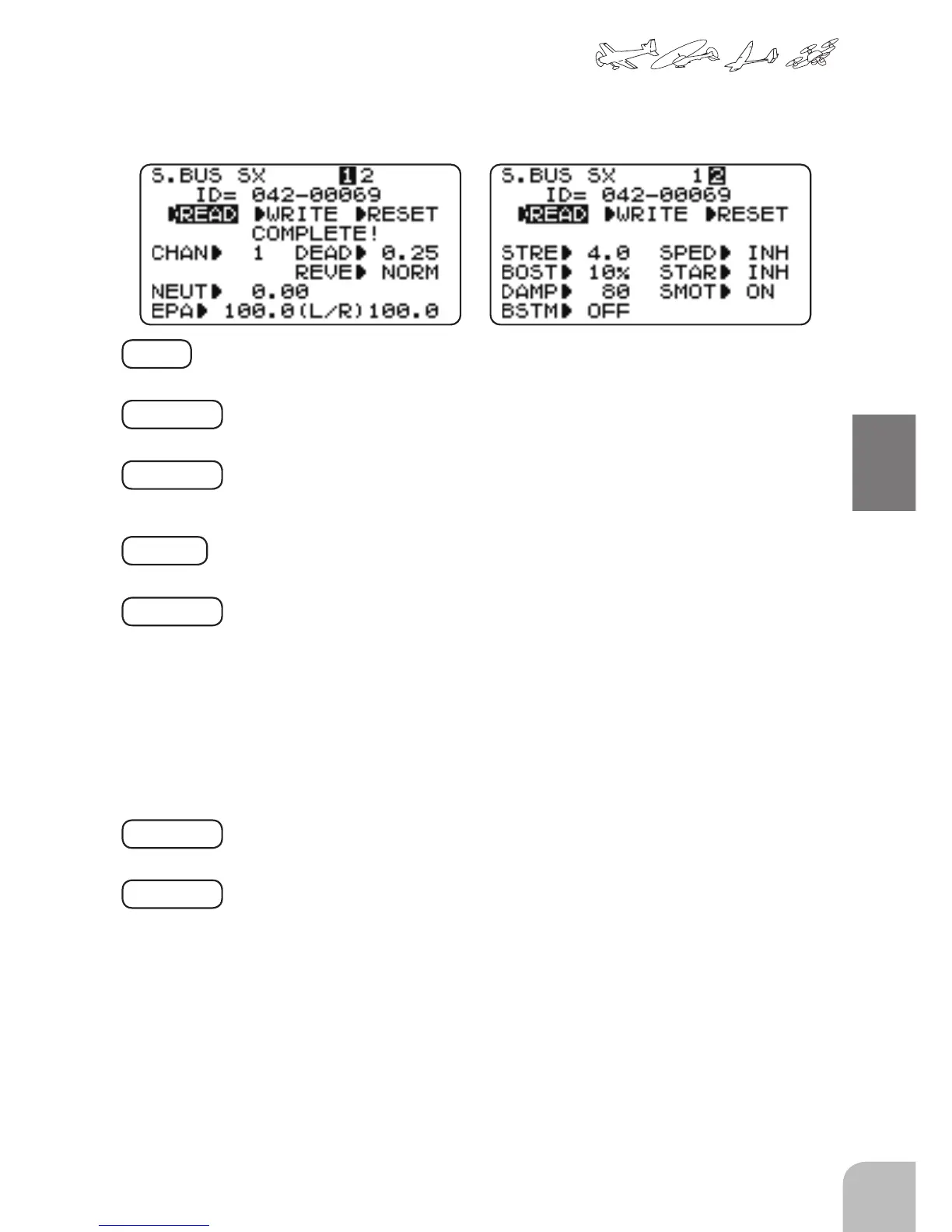
ID = [ ID ]
Displays the ID of the servo whose parameters are to be read. It cannot be changed.
CHAN ▶ [ Channel ]
Channel of the S.BUS system assigned to the servo. Always assign a channel before use.
NEUT ▶ [ Neutral Oset ]
The neutral position can be changed. When the neutral oset is large value, the servo's range
of travel is restricted on one side.
EPA ▶ [ Travel Adjust ]
The left and right travels centered about the neutral position can be set independently.
DEAD ▶ [ Dead band ]
The dead band angle at stopping can be specied.
[Relationship between dead band set value and servo operation]
Small
→
Dead band angle is small and the servo is immediately operated by a small signal
change.
Large
→
Dead band angle is large and the servo does not operate at small signal changes.
(Note) If the dead band angle is too small, the servo will operate continuously and the
current consumption will increase and the life of the servo will be shortened.
REVE ▶ [ Reverse ]
The direction in which the servo rotates can be changed.
STRE ▶ [ Stretcher ]
The servo hold characteristic can be set. The torque which attempts to return the servo to the
target position when the current servo position has deviated from the target position can be
adjusted.
This is used when stopping hunting, etc., but the holding characteristic changes as shown
below.
[Relationship between stretcher and servo operation]
Small
→
Servo holding force becomes weaker.
Large
→
Servo holding force becomes stronger.
(Note) When this parameter is large, the current consumption increases.
S.BUS Servo Description of function of each parameter
*There are a function which can be used according to the kind of servo, and an impossible
function.