9. Commissioning
MiR100 Hook User Guide (en) 10/2020 - v.3.0 ©Copyright 2016-2020: Mobile Industrial Robots A/S. 137
Remember to restart the robot if you have made any changes to the system
settings.
Planner
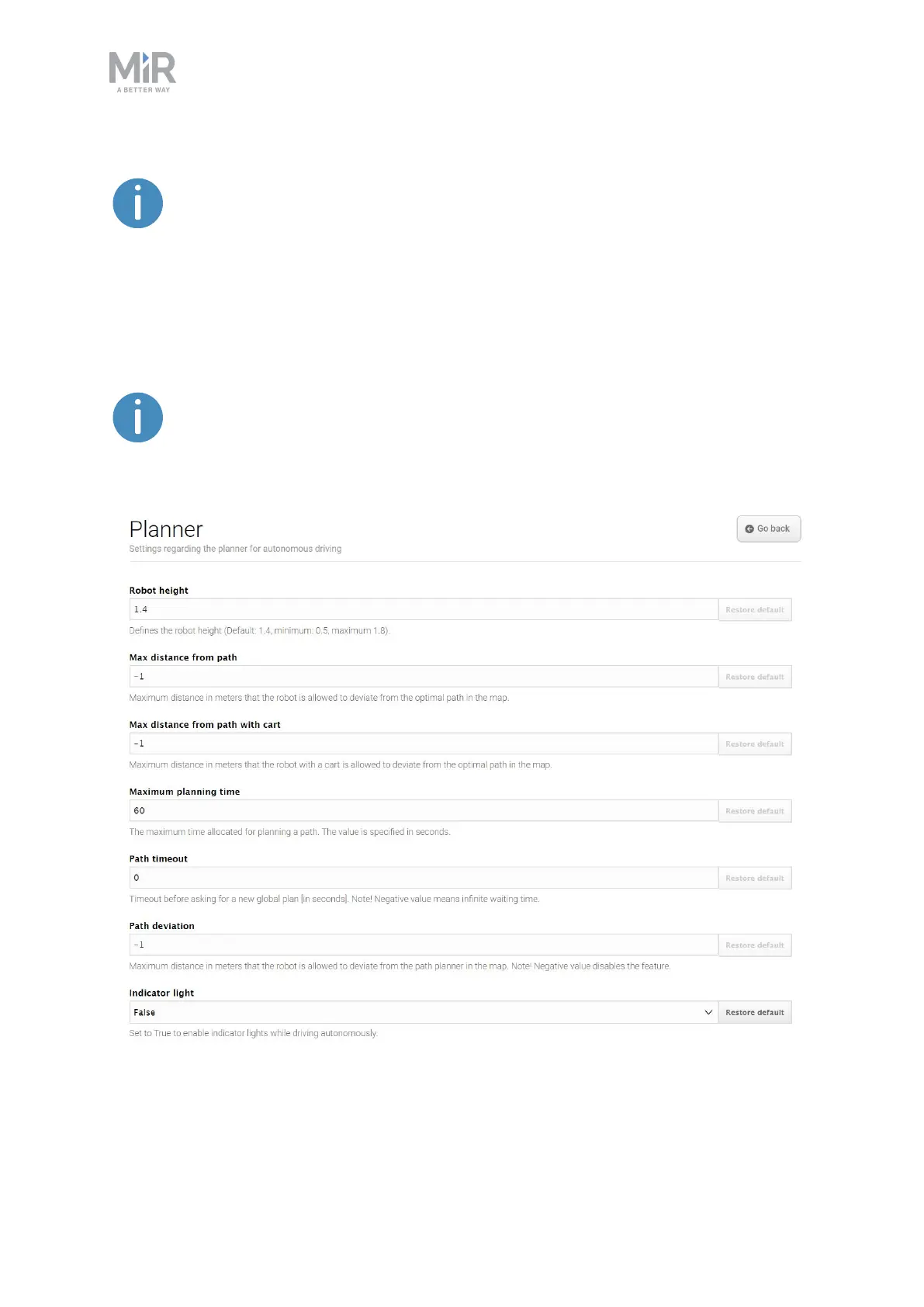
In the Planner section, you set the basic parameters for driving the robot.
This section refers to the local and global planner functions. For more
information on the robot's path planners, see Global planner on page64 and
Local planner on page66.
Figure 9.32. You set basic parameters for driving the robot in the Planner section.