10. Usage
MiR100 Hook User Guide (en) 10/2020 - v.3.0 ©Copyright 2016-2020: Mobile Industrial Robots A/S. 165
10.6 Creating the Variable footprint mission
All mission actions that require the user to specify the value of a parameter when they
choose to use the mission have the option of defining a variable. If you use a variable in a
mission, then when you add the mission to the mission queue or embed it inside another
mission, you must select a value for the parameter where the variable is used. This allows
you to reuse the same mission for different but still similar tasks.
The Variable footprint mission enables you to select which footprint the robot should use
each time the mission is run.
To create the mission, follow the steps below:
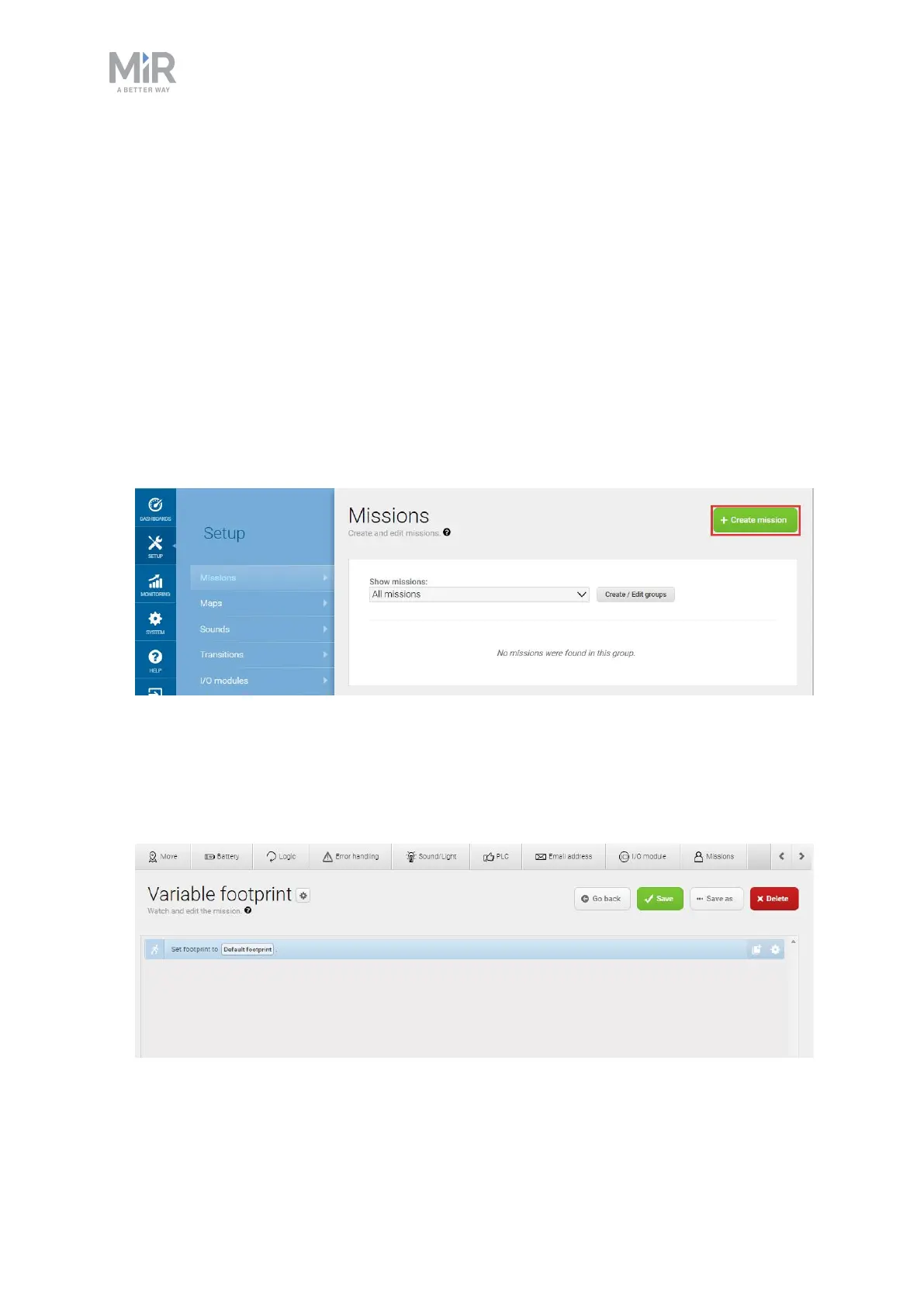
1. Go to Setup > Missions. Select Create Mission.
2. Name the mission Variable footprint. Select the group and site you want it to belong to.
Select Create mission.
3. Select the following actions:
• In the Move menu, select Set footprint.