9. Commissioning
MiR100 Hook User Guide (en) 10/2020 - v.3.0 ©Copyright 2016-2020: Mobile Industrial Robots A/S. 129
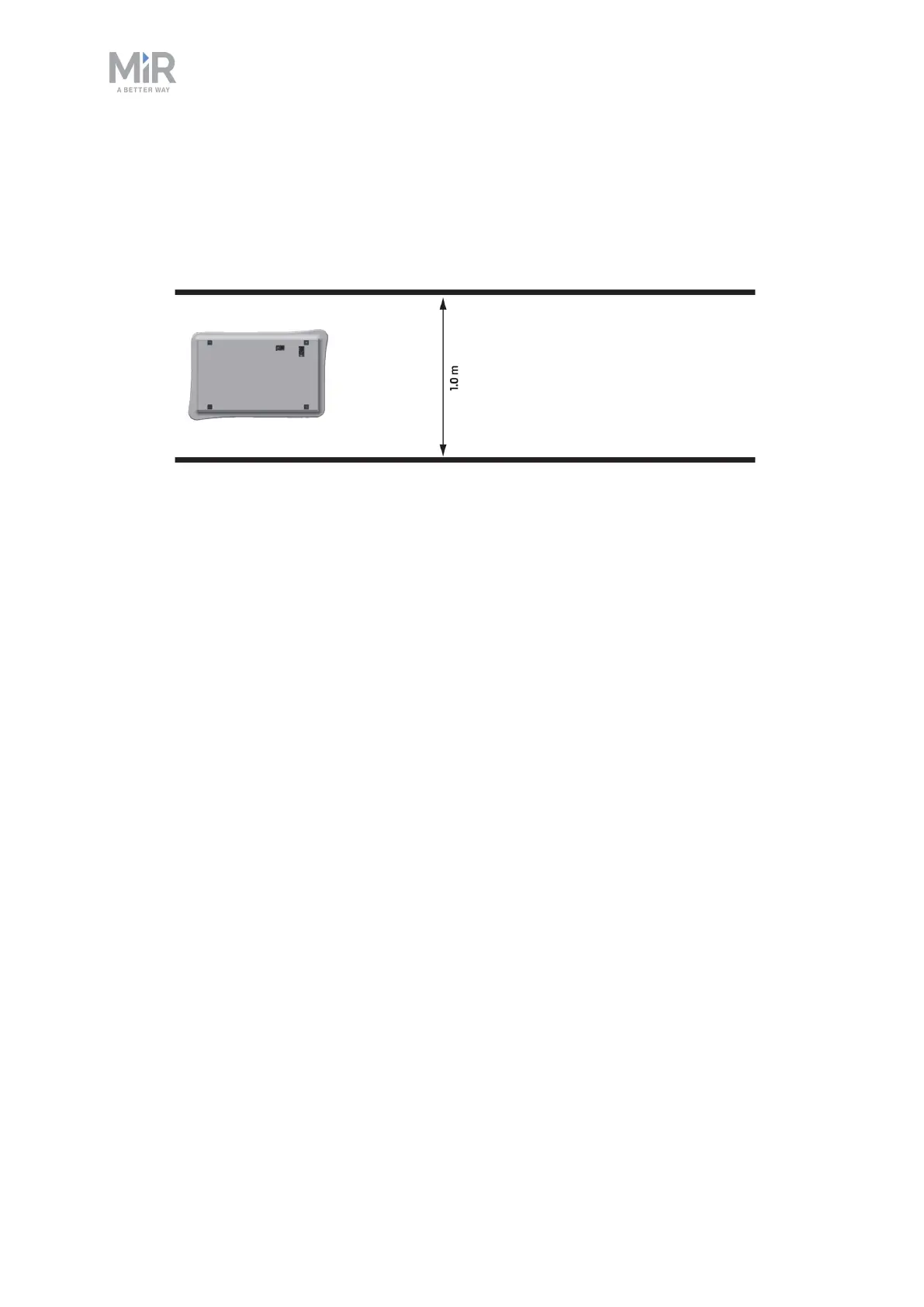
Driving straight
For the robot to be able to drive straight down a corridor, the corridor must have a width of
at least one meter.
Taking a turn around an obstacle or wall
To ensure that the robot can take a turn around an obstacle or wall smoothly and without
stopping, the corridor must be at least 1.3 m wide.
9.13 Making a brake test
It is the responsibility of the commissioner to perform an adequate test of the robot's
braking capability.
The braking distance of MiR100 Hook is particularly dependent upon four factors:
1. The speed of the robot
2. The payload of the robot
3. The surface the robot drives on
4. The decline of the surface the robot drives on
Because of this, it is not possible to predetermine the exact braking distance of MiR robots.
The distance has to be determined in the environment and under the driving conditions the
robot will be operating in.
The goal of the brake test is to ensure that the robot will brake in time to avoid a collision
with a human or object when driving with maximum payload, with different field sets for
different speeds, and at the steepest supported decline.