9. Commissioning
MiR100 Hook User Guide (en) 10/2020 - v.3.0 ©Copyright 2016-2020: Mobile Industrial Robots A/S. 128
• The robot moves to a position where the distance from the center of the Cart position and
the robots center line is 1.5 m. The robot is oriented perpendicular to the direction of the
Cart position—see Figure 9.25.
• The robot checks if the placement space is free and then moves with the cart so that the
fixed wheels on the cart are 0.2 m from the center line in the placement position—see
Figure 9.25.
• The robot now drives with the cart so it is parallel to the direction of the Cart position and
is ready to reverse into the position.
• When reversing with a cart, the robot will both warn with a loud beeping sound and a
flashing yellow light.
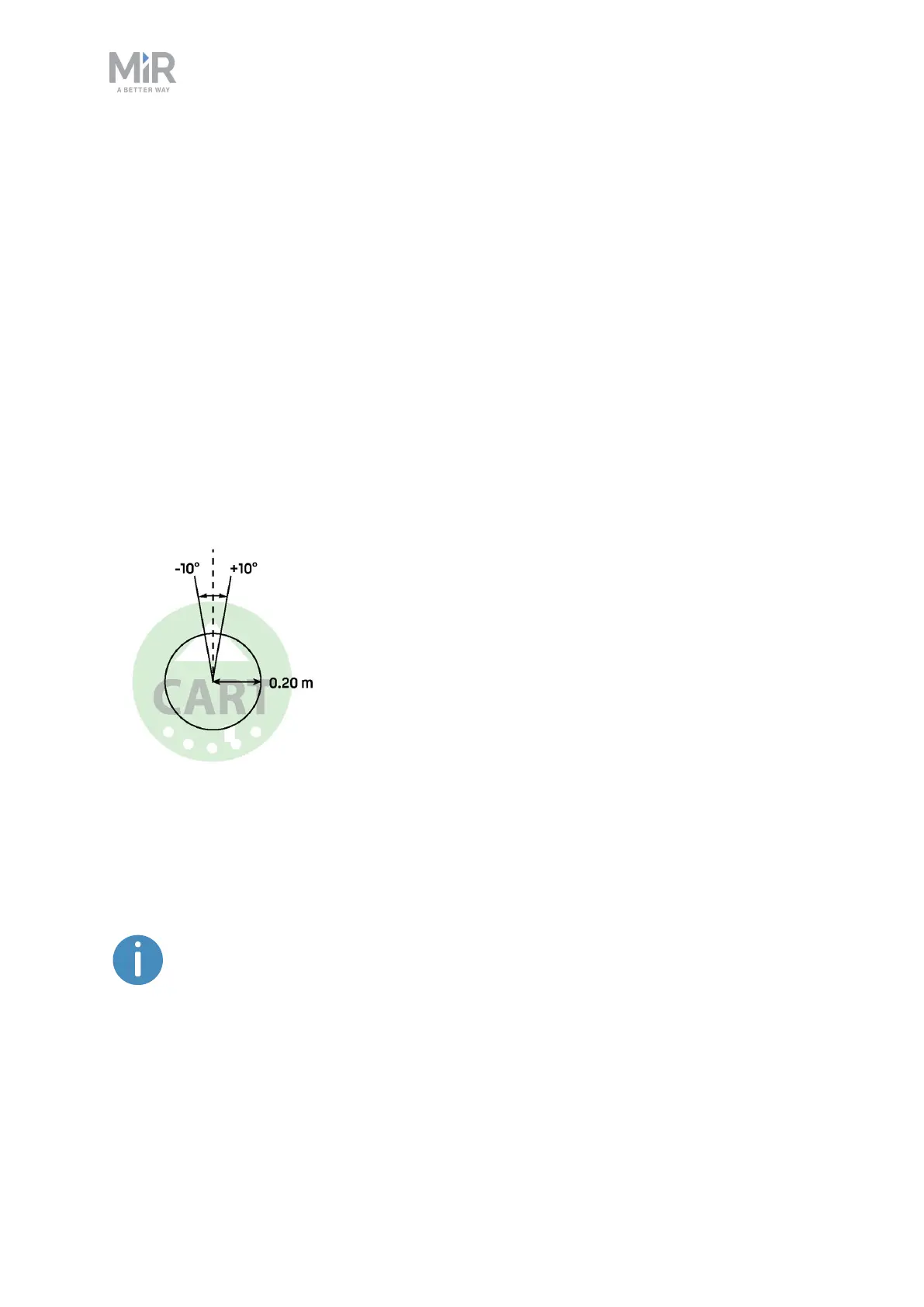
Accuracy
The robot places and picks up carts with a positional accuracy of 0.2 m and with an angular
accuracy of ±10, as shown in Figure 9.26.
Figure 9.26. The accuracy of MiR100 Hook.
Each cart is identified by its ID tag. If several carts share the same ID tag, the carts must be
identical, and the ID tag must be placed within +/- 5 mm precision on all carts.
The maneuvers in the following sections illustrates the robot traveling down a
corridor, but the dimensions are also applicable for other obstacles and
structures the robot must maneuver between.