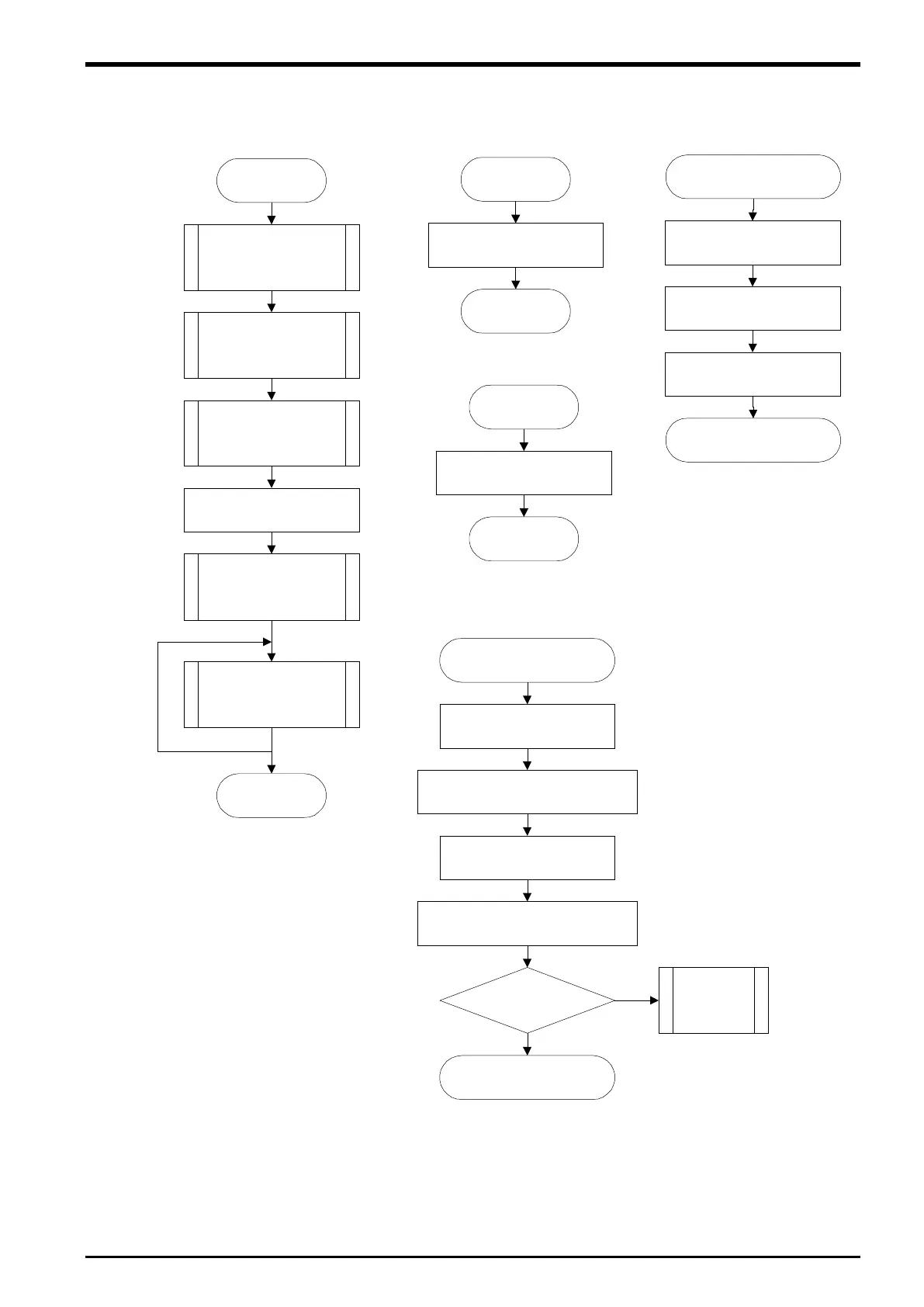
<Vision sensor initialization>
Start
<Vision sensor initialization>
End
Is the calculated
workpiece a range of
the forecast?
No
Yes
Calculate the robot origin when
the vision sensor recognizes
workpieces
Calculate the amount of conveyer
movement from vision sensor
recognition to workpiece teaching
Calculate theworkpiece position
recognized by the vision sensor
into the robot area
Calculate the vectors specifying the
center of gravity of the vision sensor
and grabbing position
Error output
(9101)

 Loading...
Loading...



