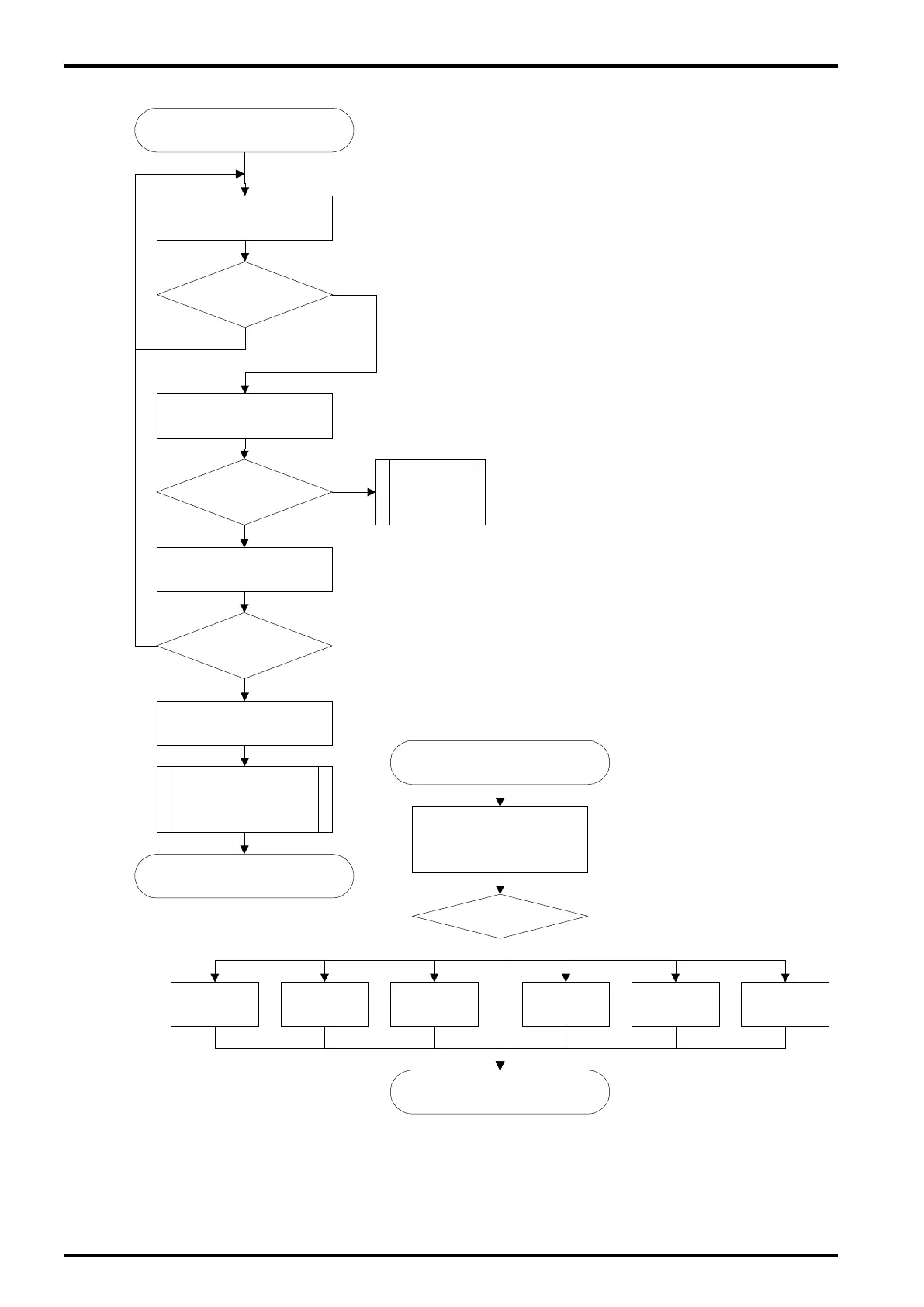
<Vision sensor recognition check>
Start
<Vision sensor recognition check>
End
Is the timing in which the
image is acquired now?
Yes
No
Calculate the difference
between last time and the
current encoder value.
Imaging request +
encoder value acquisition
Is the vision sensor
logged on?
No
Yes
Error output
(9100)
Acquire information of the
workpiece that the vision sensor
recognized.
How many are the number
of recognized
workpieces?
0 pieces
Excluding 0 pieces
Preserve each element of the
recognition data in the array
variable.
Tracking data storage
processing

 Loading...
Loading...



