13 Calibration of Conveyer and Robot Coordinate Systems (
“
A1
”
program)
13.2. Tasks
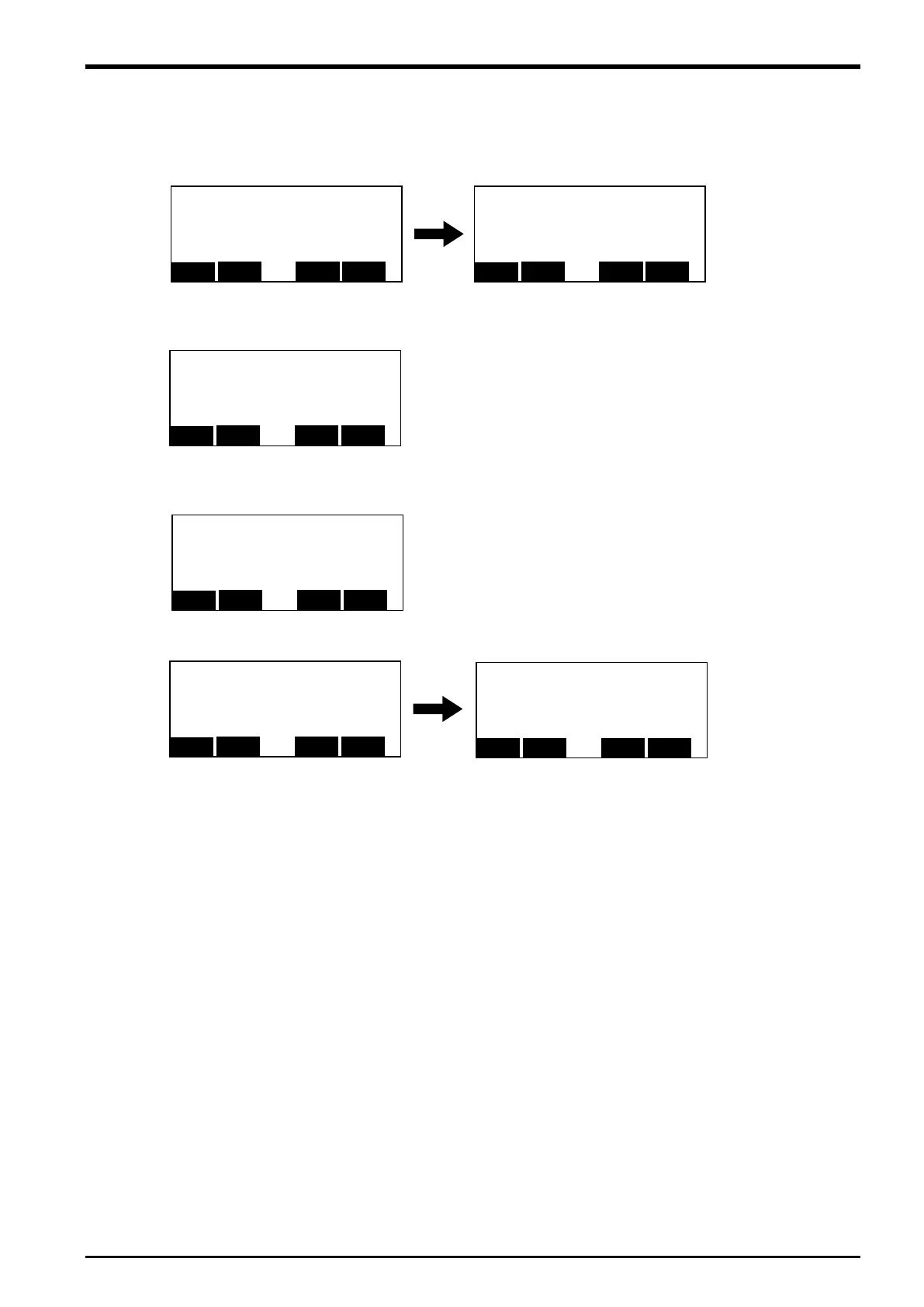
1) Set the encoder number to the X coordinates value of position variable: "PE."
(a) Press the function key ([F2]) corresponding to "the change", and display the position edit screen.
(b) The [F3] (Prev) key or the [F4] (Next) key is pressed, change the target variable, and display "PE"
on the position name.
(c) X coordinates are selected by the arrow key, press the [CLEAR] key for a long time, and delete the
details. Input the encoder number into X coordinates.
(d) Press the function key ([F2]) corresponding to "the change", and display the command edit screen.
FL1:00000007 FL2:00000000
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
FL1:00000007 FL2:00000000
FL1:00000007 FL2:00000000
FL1:00000007 FL2:00000000
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
Tasks 13-51

 Loading...
Loading...



