14 Calibration of Vision Coordinate and Robot Coordinate Systems (
“
B1
”
program)
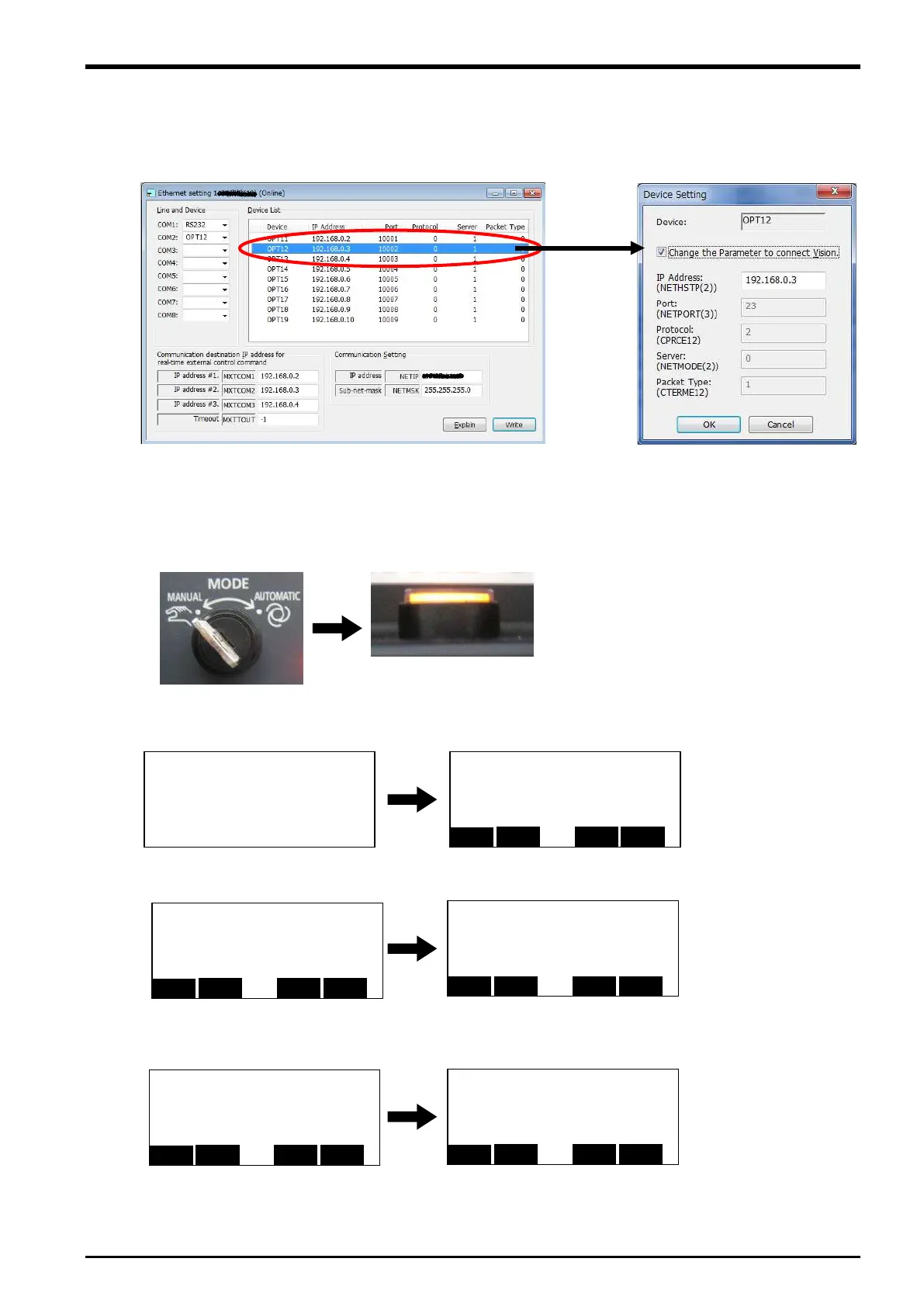
In RT ToolBox2, select [Online]-[parameter]-[Ethernet setting].
“OPT12" is selected “COM2:" that exists in "Line and Device" column on the displayed "Ethernet setting"
screen. Double-click “OPT12" that exists in "Device List" .
Check "Change the parameter to connect Vision", and Input IP address of the vision sensor to "IP
Address:" column. Click [OK] button. And, click [write] button on “Ethernet setting” screen.
Turn on robot controller's power supply again to make the set parameter effective.
2) Open “B1” program using T/B.
Set the controller mode to "MANUAL".
Set the T/B to "ENABLE".
3) Press one of the keys (example, [EXE] key) while the <TITLE> screen is displayed. The <MENU>
screen will appear.
4) Select "1. FILE /EDIT" screen on the <MENU > screen.
5) Press the arrow key, combine the cursor with the program name "B1" and press the [EXE] key. Display
the <program edit> screen.
O
P
T
B
:
:ENABLE
★
Lamp lighting
T
B
2 '# tracking robot‐conveyor calibra
4 '# Create/version : 2006.04.21 A1
1 '## Ver.A1 ########################
<FILE/EDIT> 1/ 20Rem 136320
<FILE/EDIT> 1/ 20Rem 136320
COPYRIGHT (C) 2011 MITSUBISHI ELEC
TRIC CORPORATION ALL RIGHTS RESE
Operation procedure 14-55

 Loading...
Loading...



