14 Calibration of Vision Coordinate and Robot Coordinate Systems (
“
B1
”
program)
12) Move the calibration seat by starting the conveyer within the robot movement range.
13) Move the robot to the position right above the first mark on the conveyer.
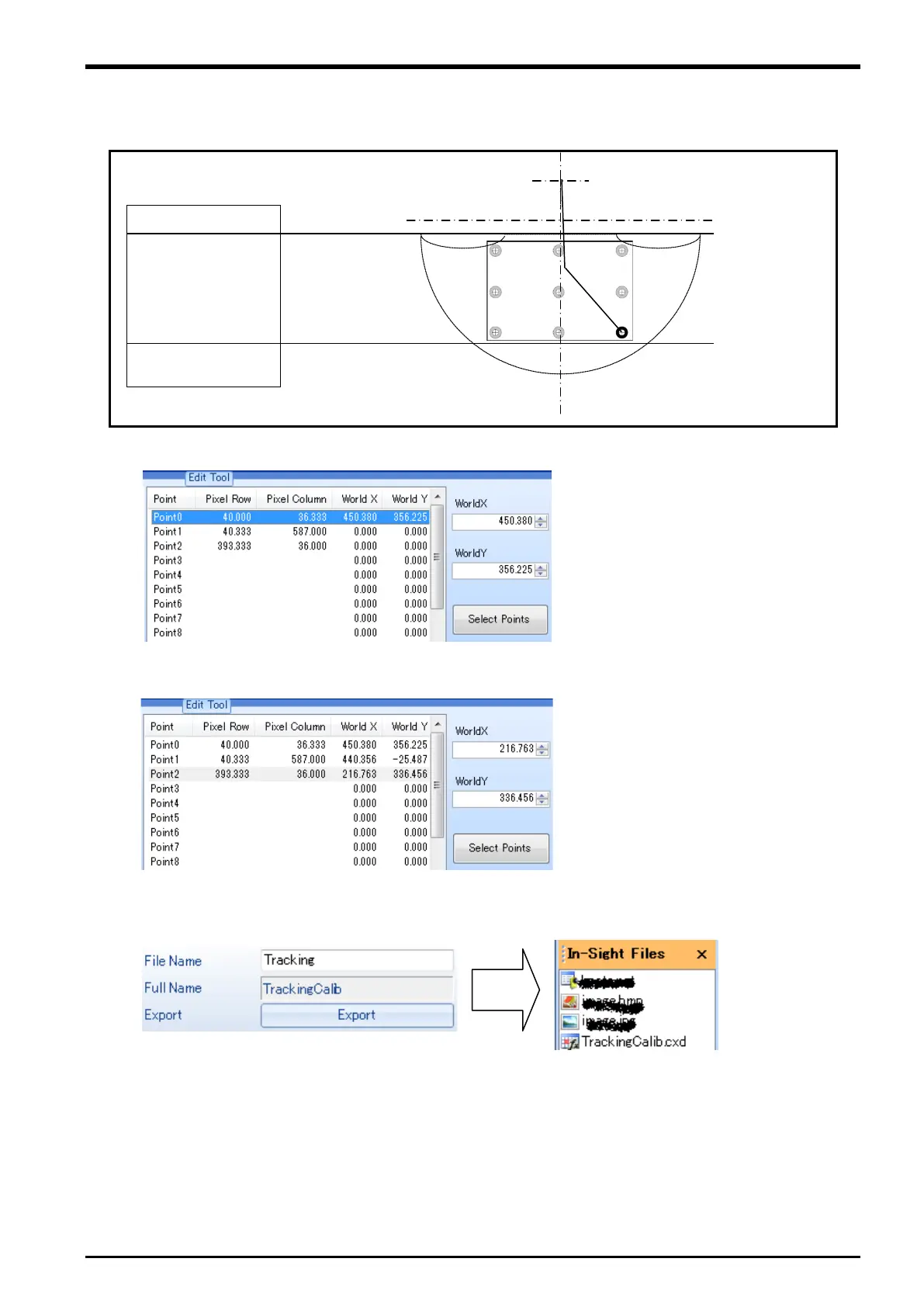
14) Click [Get position] button in “Edit Tool” column of In-Sight Explorer.
Confirm the current position of the robot was displayed in [world X] and [world Y].
15) Similarly, move the robot hand to the mark of the second point and the third point, and acquire the
current position of the robot with [Get position] button of In-Sight Explorer.
16) Input an arbitrary name to "File name" in the tool edit column of In-Sight Explorer, and click the export
button. And, confirm the calibration file of the specified name was made in the vision sensor.
17) Raise the robot.
* With this operation, encoder data is acquired.
Move the robot to first point
Tasks 14-61

 Loading...
Loading...



