14 Calibration of Vision Coordinate and Robot Coordinate Systems (
“
B1
”
program)
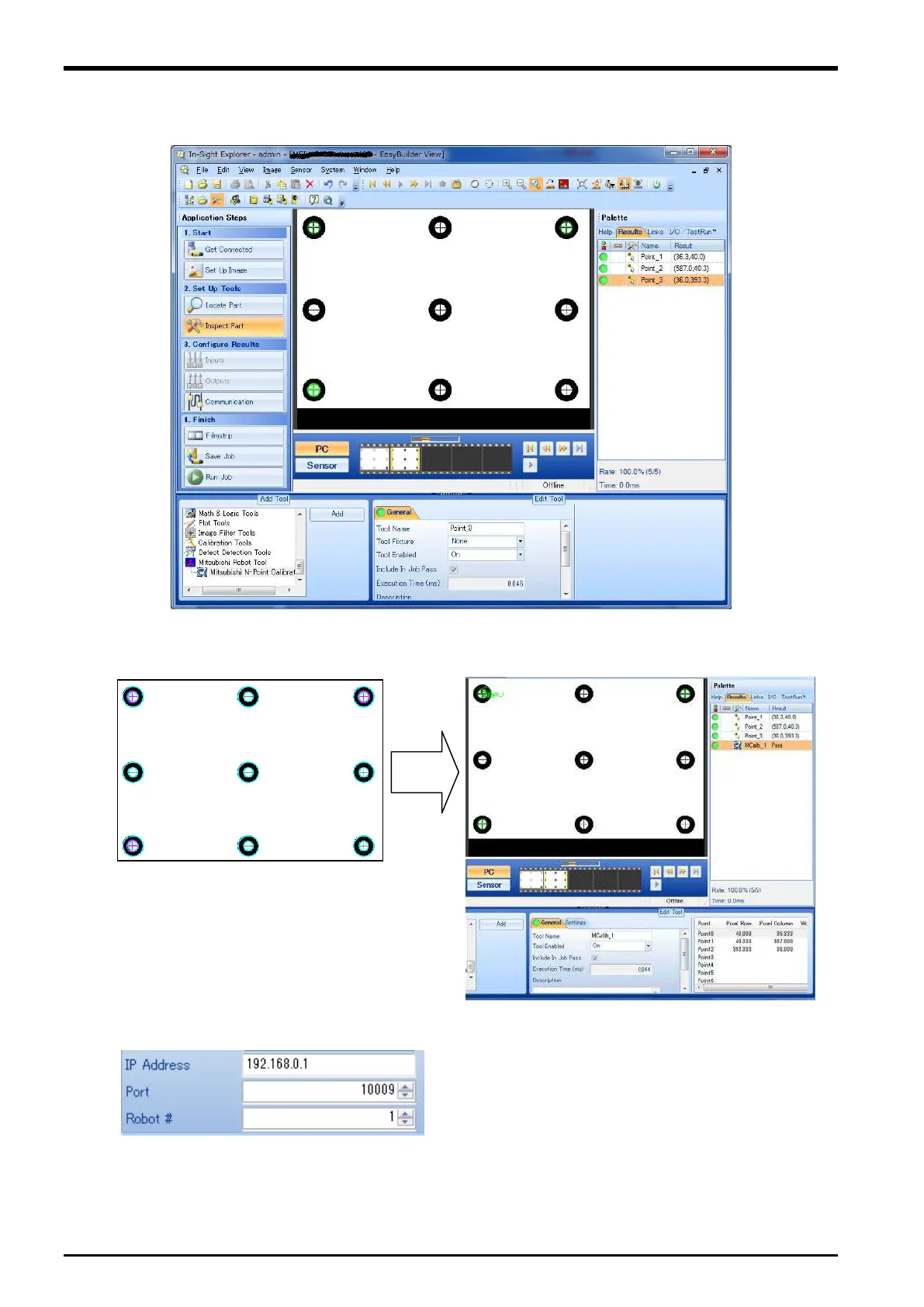
8) Select [Mitsubishi Robot Tool] – [Mitsubishi N-point calibration] in “Add Tool” column of this tool.
9) Click [Add] button. Select “User-Defined point” three points specified ahead from nine displayed marks.
Then, Click [OK] button.
10) Open the [Settings] tab screen from the “Edit Tool”, and input IP address set to "Robot IP address".
11) Make the vision sensor online.
14-60 Tasks

 Loading...
Loading...



