15 Workpiece Recognition and Teaching (
“
C1
”
program)
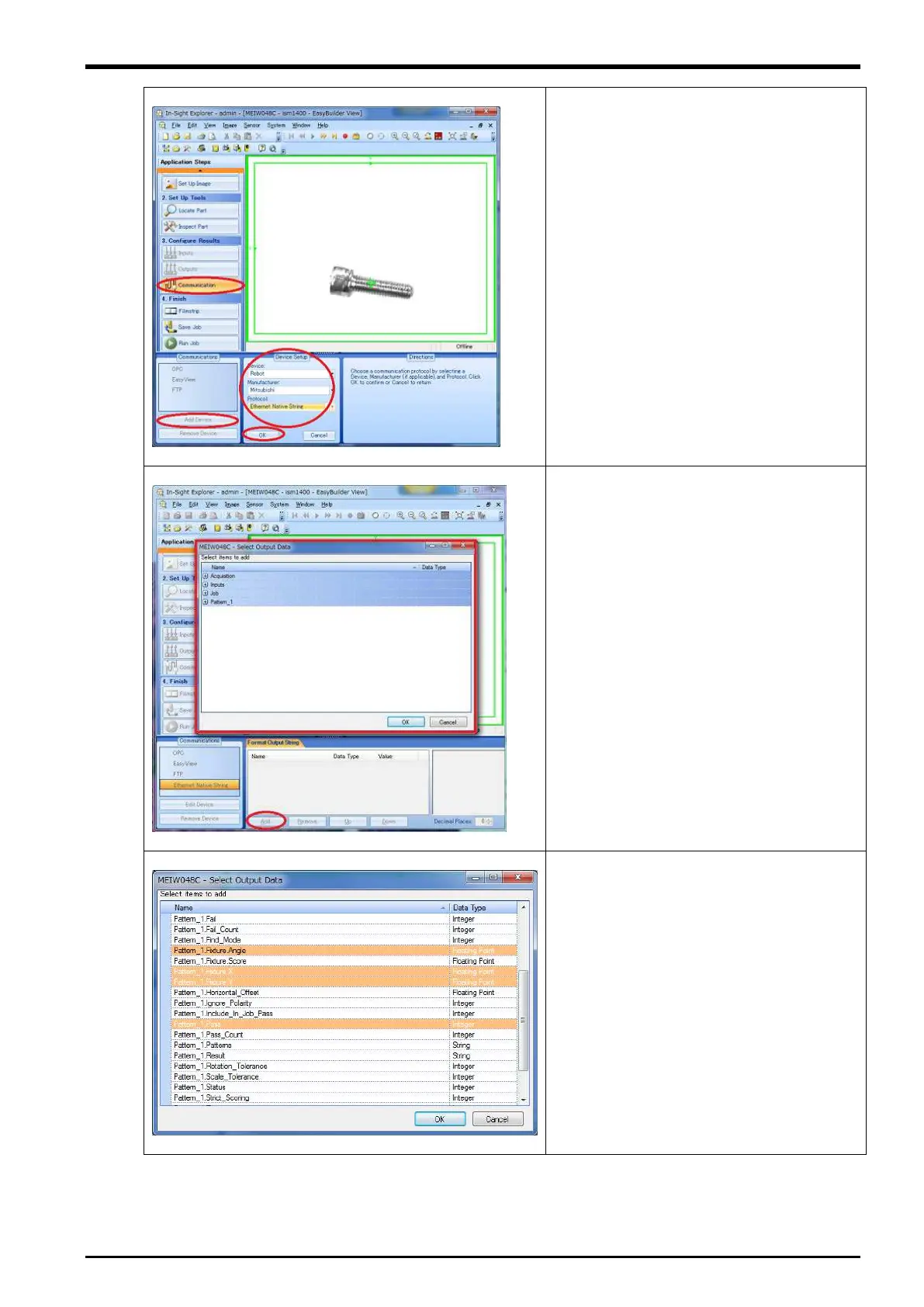
Do the communication setting.
Click [Communication] from “Application
Steps”.
Click [Addi Device] from "Communications".
Select the following from "Device Setup".
[Device:] "Robot"
[Manufacturer:] "Mitsubishi”
[Protocol:] "Ethernet Native String"
Click [OK] button.
Set the communication format. (preparation)
Click [Add] button from "Format Output
String".
->
"Select Output Data" screen opens.
Set the communication format. (selection)
Click [+] sign of “Pattern_1”, and select it in
the following order while pushing the [Ctrl]
key.
(1) Pattern_1. Pass
(2) Pattern_1. Fixture.X
(3) Pattern_1. Fixture.Y
(4) Pattern_1. Fixture.Angle
Click [OK] button.
Program for Vision Tracking 15-71

 Loading...
Loading...



