9-60 Manual # 42-02-2223
Reference
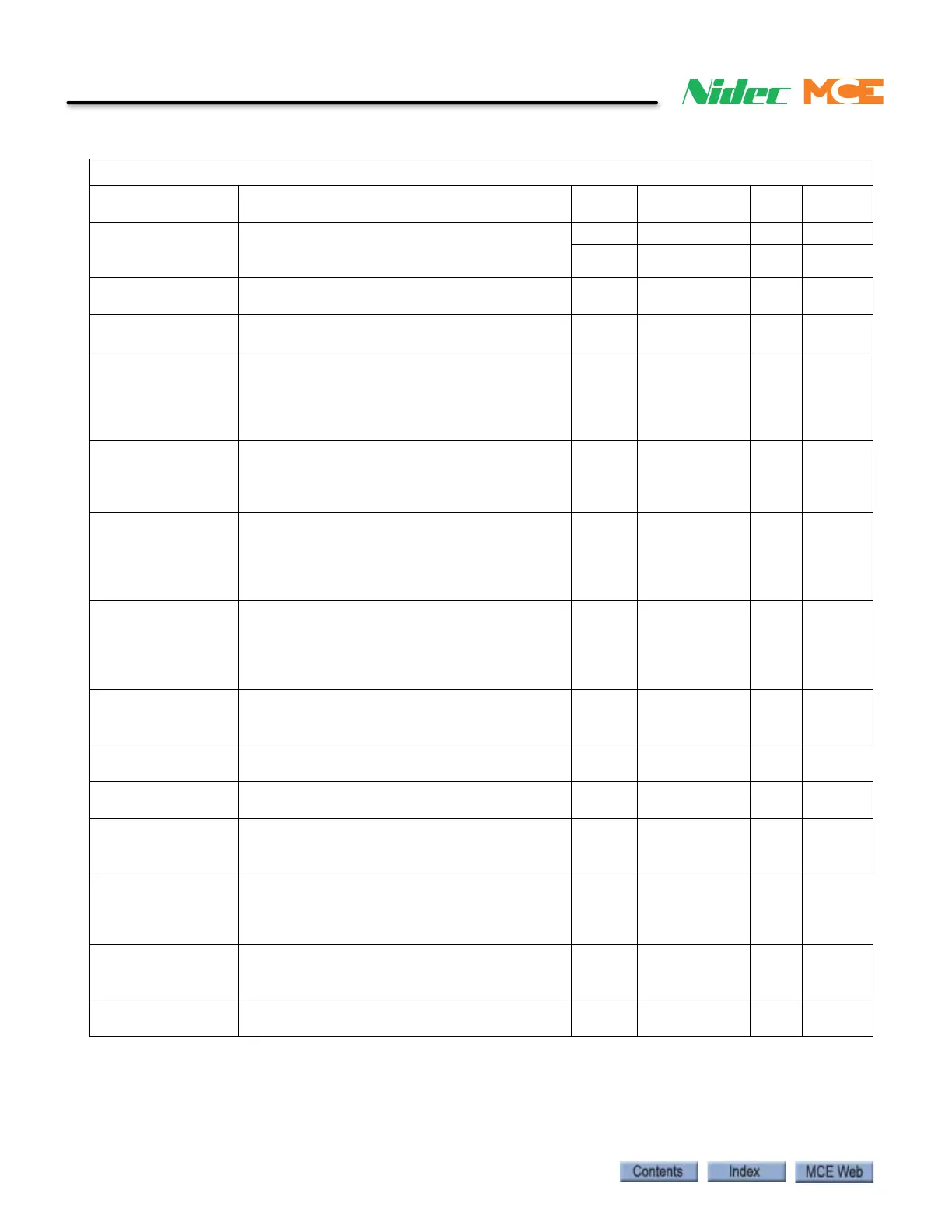
A6 Motor Submenu
MOTOR ID Motor Identification none -pm default -pm
def
-pm
default
RATED MOTOR
POWER
Sets rated power in horsepower (HP) or kilo-
watts (kW) of motor. Value obtained from
motor nameplate.
HP 1.0 – 500.0 0.0 *
kW 0.75 – 400.00 0.00 *
RATED MTR VOLTS Sets rated motor voltage. Value obtained from
motor nameplate.
Volts 85.0 – 575.0 0.0 *
RATED MOTOR
CURR
Sets rated motor current. Value obtained from
motor nameplate.
Amps 1.00 – 800.00 0.00 *
MOTOR POLES Sets number motor poles. MUST be even num-
ber or Setup Fault #3 will occur. Value
obtained from motor nameplate or calculated
from motor excitation frequency and rated
motor speed.
None 2 – 128 0 *
RATED MTR SPEED Sets rated rpm of Motor. Function of motor
only. Does not need to match Control Mtr
Speed setting. Value obtained from motor
nameplate.
RPM 18.0 – 3000.0 0.0 *
D AXIS INDUCT Sets amount of inductance in flux producing
equivalent circuit of vector controlled PM
motor. Higher inductances used for higher
horsepower motors. Obtain from motor speci-
fications.
mH 0.50 – 50.00 10.00 *
Q AXIS INDUCT Sets amount of inductance in torque producing
equivalent circuit of vector controlled PM
motor. Higher inductances used for higher
horsepower motors. Obtain from motor speci-
fications.
mH 0.50 – 50.00 10.00 *
STATOR RESIST Sets amount of resistance in motor stator as a
percent of BASE IMPEDANCE, D2 which
appears in the Power Data display.
% 0.0 – 20.0 7.0 *
MOTOR IRON LOSS Sets motor iron loss at rated frequency. Units
in percent of rated power.
% 0.0 – 15.0 0.0 0.0
MOTOR MECH LOSS Sets motor mechanical losses at rated fre-
quency. Units in percent of rated power.
% 0.0 – 15.0 1.0 1.0
OVLD START LEVEL Defines maximum current at which motor can
run continuously without triggering motor
overload
% 100 – 150 110 110
OVLD TIME OUT Motor Overload Time out. Defines amount of
time before motor overload alarm occurs when
motor is running at current level defined OVLD
Start Level+40% rated motor current
sec 5.0 – 120.0 60.0 60.0
TRQ CONST SCALE Torque constant scale. Drive automatically cal-
culates torque constant. Value can scale calcu-
lated torque constant for better performance.
None 0.50 – 2.00 0.78 0.78
ENCODER ANG
OFST
Encoder Angle Offset. Contains value of align-
ment determined during alignment procedure.
None 0 – 25000
Table 10. Quattro PM Elevator Drive, iControl